
While much of the work done in robotics at JPL is research, the ultimate value of the technology is in its ability to enable and enhance our exploration of the solar system. Four flight projects are of special significance in the level of robotic technologies captured by them, and these contributions are described at the links below.
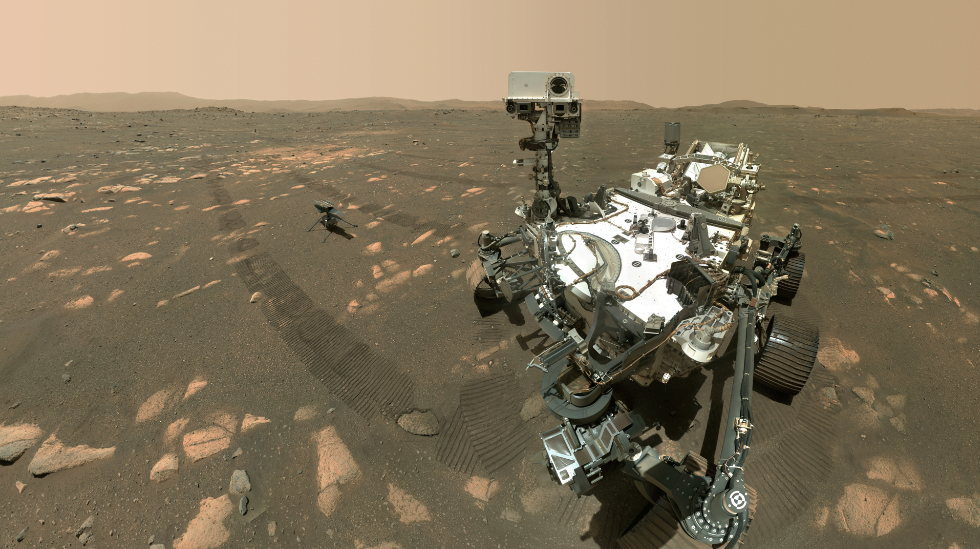
The Mars 2020 Perseverance rover landed on Mars February 18th 2021. It is the next step in the exploration of Mars following the highly successful Curiosity rover which landed on Mars in 2011. The rover carries more sophisticated, new and upgraded hardware, instruments, and technology to conduct geological assessments of the rover’s landing site, determine the potential habitability of the environment, and directly search for signs of ancient Martian life.
The Perseverance rover carried with it a technology demonstration, the Ingenuity helicopter, which demonstrated the first successful controlled powered flight on another planet.
The rover has a drill to collect core samples of Martian rock and soil, then store them in sealed tubes for pickup by a future mission that would ferry them back to Earth for detailed analysis. Perseverance will also test technologies to help pave the way for future human exploration of Mars. There are several ways that the mission helps pave the way for future human expeditions to Mars and demonstrates technologies that may be used in those endeavors. These include testing a method for producing oxygen from the Martian atmosphere, identifying other resources (such as subsurface water), improving landing techniques, and characterizing weather, dust, and other potential environmental conditions that could affect future astronauts living and working on Mars.
JPL Robotics engineers are contributing to this project in a number of areas, similar to other Mars Rover Projects (Pathfinder, MER Spirit and Opportunity, MSL Curiosity). Specific areas with significant involvement are linked below.
For more details on all aspects of the Mars 2020 mission, visit the Mars 2020 Project website.
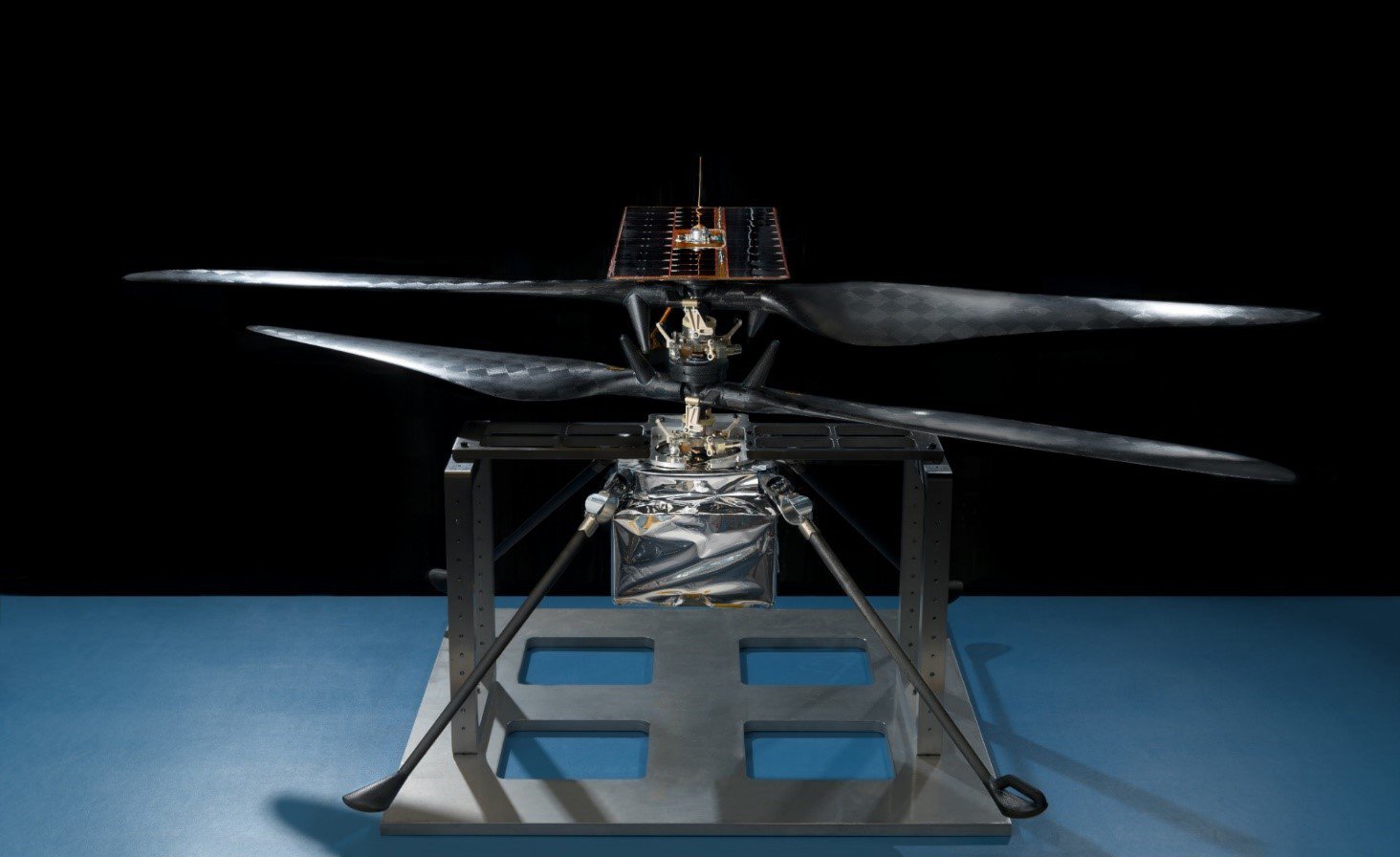
Flight Model image of Ingenuity before delivery to Kennedy Space Center for Launch.
Ingenuity Mars Helicopter is a Technology Demonstration part of M2020 Perseverance, with the core objective of proving that powered flight is possible in the cold and this atmosphere of Mars. Ingenuity’s mission was a success, with its first of many sorties on 4/19/2021, Sol 58, at 3:34 a.m. EDT / 12:34 a.m. PDT / 12:33 Local Mean Solar Time (Mars time).
Ingenuity completed its Technology Demonstration mission across its 5-flight 30-sol mission, exploring the flight envelope of the rotorcraft, taking up-close color images of the Martian terrain, and delivering humanity’s Wright Brothers moment on Mars.
To learn more about Ingenuity, please visit: https://mars.nasa.gov/technology/helicopter/
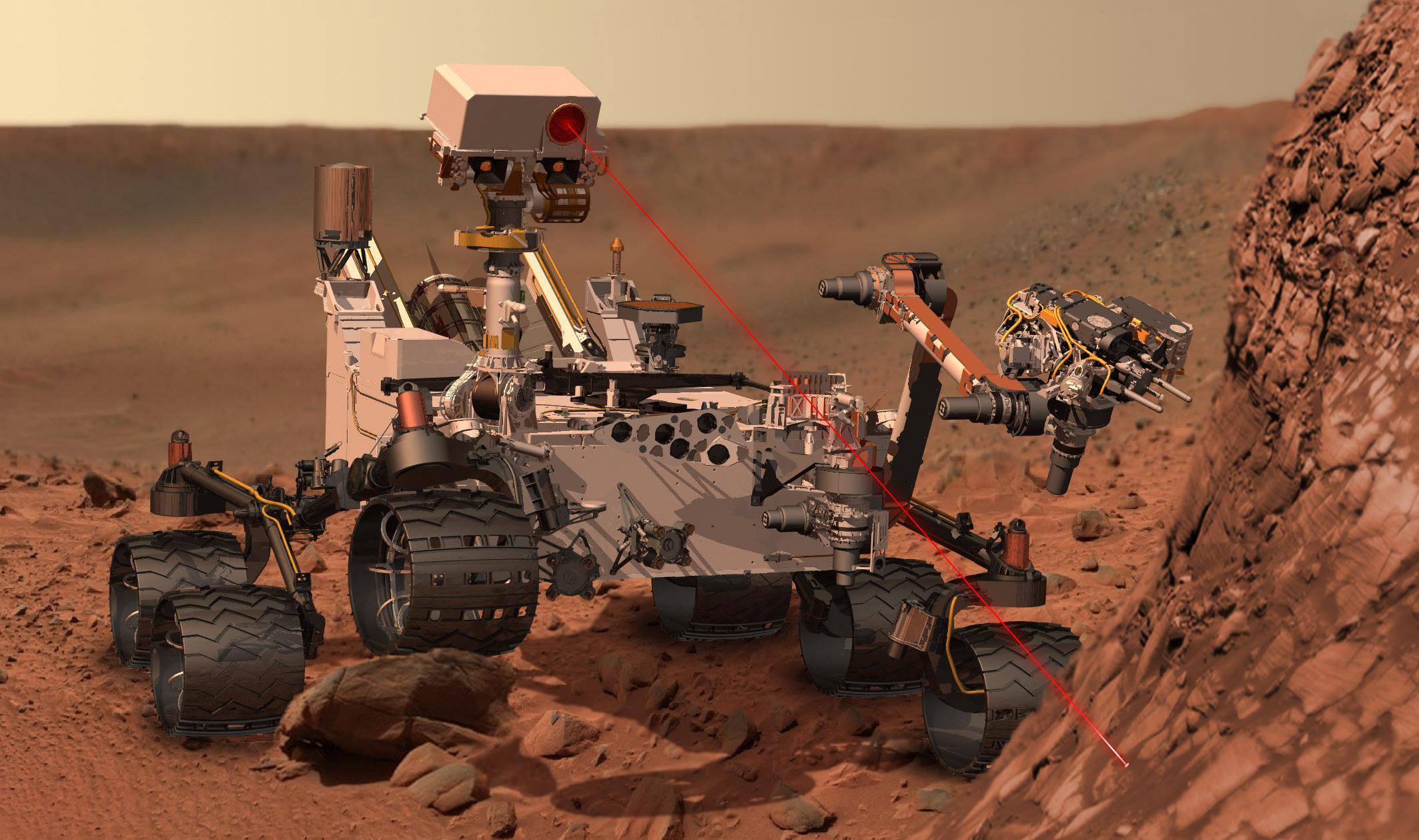
Figure 1: The Curiosity Rover
The Curiosity Rover is part of the Mars Science Laboratory (MSL) mission, NASA’s third generation rover for exploring the red planet. At the time it landed in 2012 it carried the biggest and most advanced suite of instruments for scientific studies ever sent to the Martian surface, MSL employed a new entry, descent, and landing (EDL) system. The spacecraft descended on a parachute and then, during the final seconds prior to landing, lowered the upright rover on a tether to the surface.
After landing, Curiosity has relied on a six-wheel rocker-bogie mobility system, which is able to roll over obstacles up to 75 centimeters high and travel up to 90 meters per hour. Additionally, it has a mast with pointable remote-sensing science instruments, and an arm capable of placing contact science instruments and acquiring regolith samples for on-board analysis. The rover’s onboard laboratory was designed to study rocks and soils of the local geology to assess what the Martian environment was like in the past. Currently the rover continues its exploration of Gale crater and Mount Sharp. Below are more detailed descriptions of specific JPL Robotics contributions to this ongoing mission.
To learn more about the Mars Science Laboratory mission, visit the MSL page.
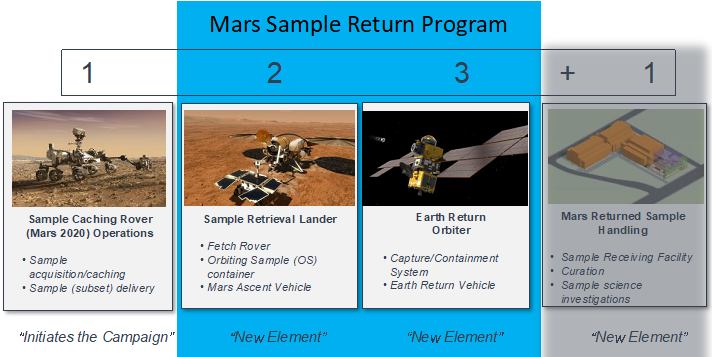
Figure 1: Mars Sample Return Program
The Sample Retrieval Lander (SRL) is part of the Mars Sample Return Campaign whose goal is to return Mars surface core samples back to Earth by the early 2030s. Mars 2020 was the first in the series of missions and is currently collecting and caching core samples on Mars. SRL is the second in the series whose purpose is to retrieve the samples collected by the M2020 Perseverance rover, package them and launch them in to Mars orbit. The third mission in the series is the Earth Return Orbiter (ERO) whose job is to capture and contain the samples in Mars orbit and effectively launch them back to Earth.
The SRL mission is composed of two landers. The first transports the Sample Fetch Rover (SFR) to surface where it will retrieve sample tubes deposited in various depots by the Perseverance rover. The second lander contains the Sample Transfer System (STS) and the MAV (Mars Assent Vehicle). STS is responsible for retrieving tubes from either SFR or Perseverance, placing a curated set of them in the MAV, and preparing the MAV for launch by closing out one or more covers.
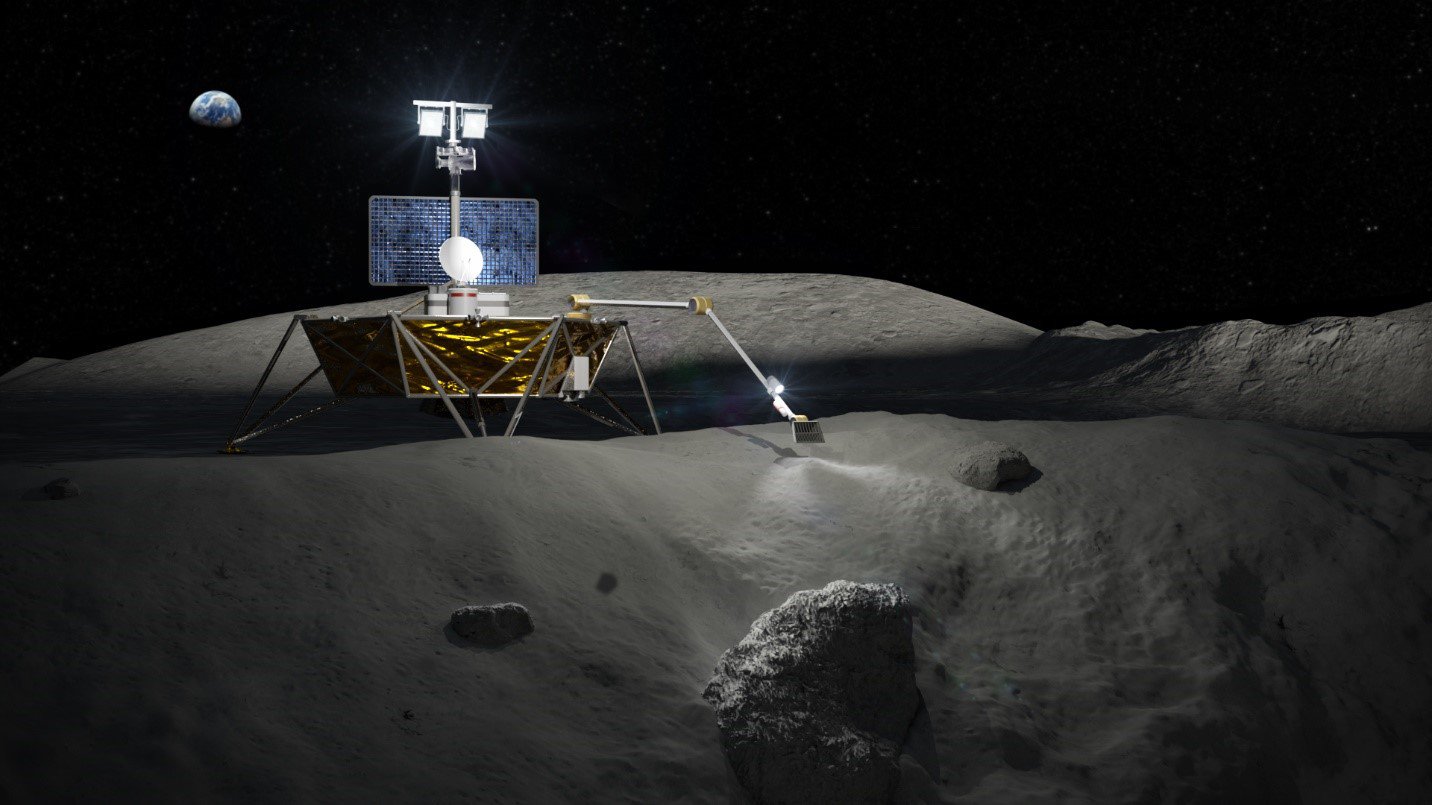
The Cold Operable Lunar Deployable Arm (COLDArm) payload, co-developed by JPL and Motiv Space Systems, will significantly improve the utility for lunar landers by providing manipulation capabilities in cryogenic temperatures, including during the lunar night.
COLDArm is under development for a Lunar Technology Demonstration Mission under the Commercial Lunar Payload Services (CLPS) program. The COLDArm payload will provide a practical way for a variety of future CLPS payload instruments to reach the surface, collect samples, deploy other instruments and provide critical data to the lander while demonstrating technologies to enable missions to future lunar and Ocean Worlds extreme environments.
It will advance key technological capabilities. As a robotic arm system, COLDArm applies Bulk Metallic Glass (BMG) actuators to enable operation below 100 K without heaters, saving mission critical resources such as time, power & mass. It also enables the collection of temperature-sensitive volatile samples.
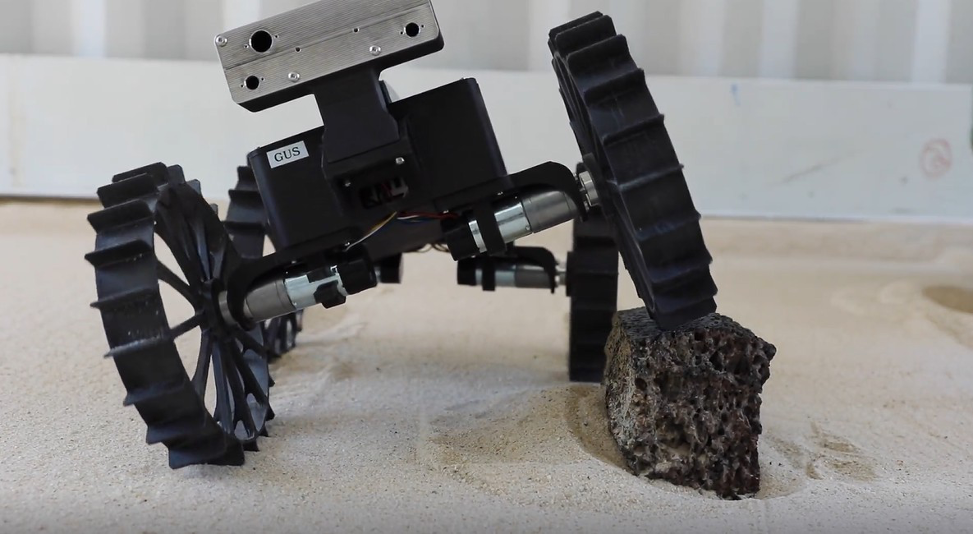
CADRE Mobility Test Platform driving over a rock
CADRE (Cooperative Autonomous Distributed Robotic Exploration) is a new robotic technology designed to demonstrate collaborative, autonomous exploration and formation sensing by navigating, communicating, computing, perceiving and decision-making without human interaction.
To demonstrate the CADRE technology, NASA/JPL is developing multiple small rovers, capable of surviving the daytime Lunar environment and carrying a micro-payload. The systems is designed so that agents (Rovers and a Basestation) share data among the team and make cooperative decisions about the execution of tasks in the workspace. The rovers will autonomously travel in formation and cooperatively explore the local Lunar surface, generate a digital elevation map and perform a distributed measurement with the micro-payload.
CADRE is funded out of the Space Technology Mission Directorate of NASA, under the Game Changing Development program and manifested as a payload on CP11, a Commercial Lunar Payload Services (CLPS) mission, targeting a late 2023 launch, landing in the equatorial region of the Moon, near Reiner Gamma. Although CADRE is a technology demonstration, the Reiner Gamma region holds particular scientific interest due to the presence of magnetic anomalies that produces visual swirls on the lunar surface.