
JPL Robotics led MSL Robotic Arm (RA) development, drill development, and pre-launch Rover Integration.
MSL RA is the most complex and capable manipulator ever sent to another planetary surface, enabling sample acquisition, processing, and delivery, as well as contact science operations. The robotic arm is a 5 degrees-of-freedom manipulator supporting a 30 kg payload mounted at the end of the arm. The turret mounted payload includes a drill and four contact science instruments.
JPL Robotics engineers managed the development of the manipulator, created the control software for it, and continue to lead the operation of it on Mars. Similarly, JPL roboticists developed the drill control software, performed all the testing and validation of it, and lead in its use for sample collection from Martian rocks.
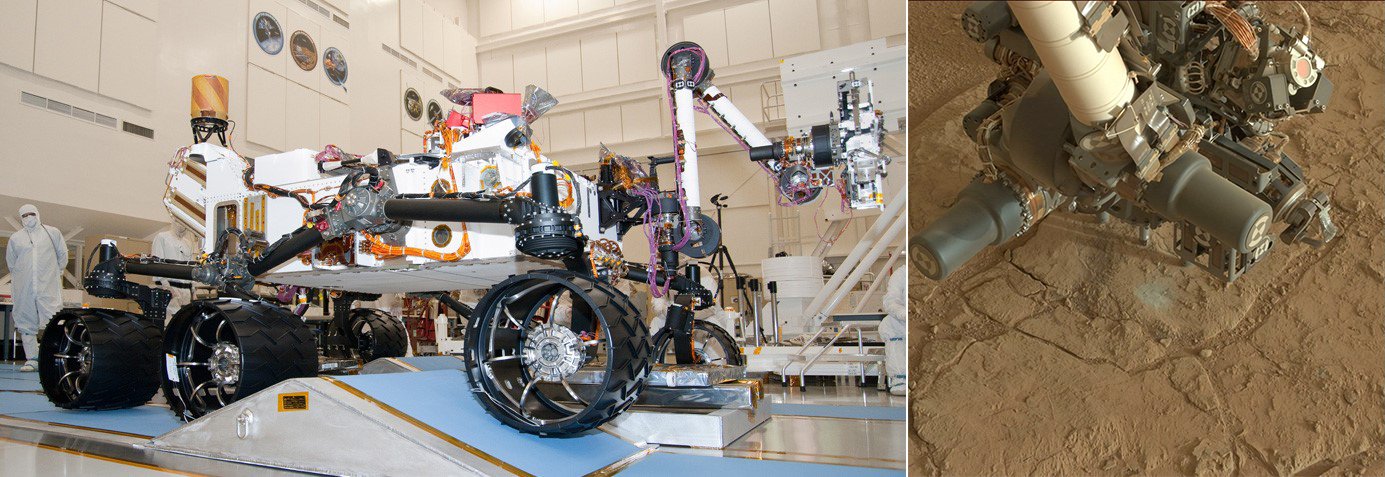
Curiosity rover with the RA extended, and a view of drilling operations.