
While much of the work done in robotics at JPL is research, the ultimate value of the technology is in its ability to enable and enhance our exploration of the solar system. Four flight projects are of special significance in the level of robotic technologies captured by them, and these contributions are described at the links below.
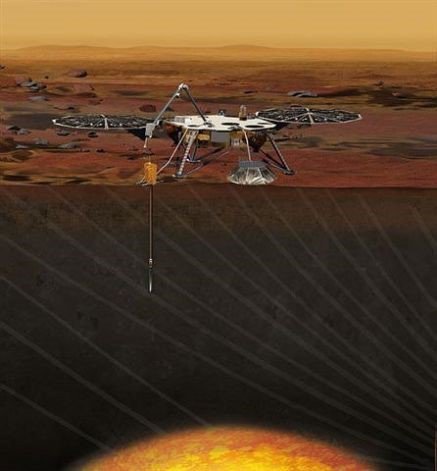
InSight is NASA’s first successful precision robotics instrument placement and release on another astronomical body since Apollo. This operations breakthrough enabled NASA’s InSight lander to detect the first known ‘marsquake’, a faint trembling of Mars’s surface on 6th April 2019, 128 Martian days after landing on Mars on the 26th of November 2018.
The Robotics Instrument Deployment Systems (IDS) enabled successfully deployment of the InSight science payload to the surface of Mars. InSight’s payload includes a seismometer (SEIS), Wind and Thermal Shield (WTS) and Heat Flow and Physical Properties Package (HP3), enabling scientists to perform the first comprehensive surface-based geophysical investigation of Mars’ interior structure.
The InSight Instrument Deployment System (IDS) consists of the Instrument Deployment Arm (IDA), scoop, five finger “claw” grapple, motor controller, arm-mounted Instrument Deployment Camera (IDC), lander-mounted Instrument Context Camera (ICC), and control software. The IDS enabled the first successful precision robotic instrument placement and release (SEIS and HP3) and first ever precision robotic stacking of two payloads (SEIS and WTS) without closed-loop visual servo control on another planetary surface.
For more details on all aspects of the InSight Lander mission, visit the InSight Project website.
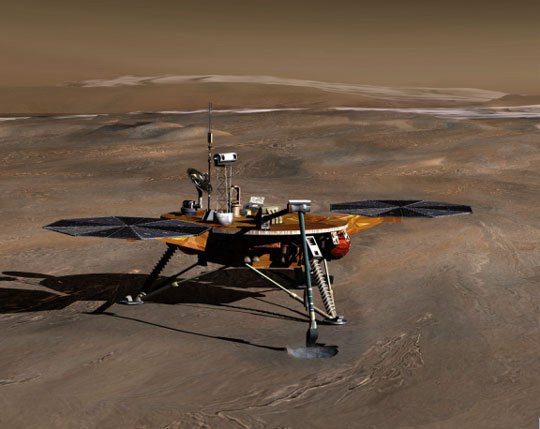
Phoenix Mars Lander: Robotic Arm, Targeting and Simulation, and Landing Site Characterization
After a flawless landing in the north-polar region of Mars on 25 May 2008, National Aeronautics and Space Administration (NASA)’s Phoenix Mars Lander RA started an unprecedented surface and subsurface exploration of its landing site, a unique geologic setting for landed missions on Mars (Figure 1). The Phoenix Mars Lander mission is part of NASA’s Mars Exploration Program, a long-term effort of robotic exploration of the red planet to conduct field geology and atmospheric characterization. NASA’s Phoenix Mars Lander mission is the first under the NASA Mars Scout Program. The primary objectives of Phoenix mission was to 1) study the history of water in the Martian arctic and 2) search for evidence of a habitable zone and assess the biological potential of the ice–soil boundary. The RA operations team played a critical role in enabling scientists to characterize a wide range of surface and subsurface soil at the landing site in a timely manner. This enabled the hunt for geological clues that revealed that the soil is much more hospitable than many scientists had assumed.
The RA operations team developed and implemented several complex command sequences that used the icy soil acquisition device (ISAD) on the RA to acquire samples of Martian dry and icy soil and delivered the samples to the thermal and evolved gas analyzer (TEGA) [1] and the microscopy, electrochemistry, and conductivity analyzer (MECA) [2] on the lander deck during an extremely constrained tactical timeline.
For more details on all aspects of the Phoenix Lander mission, visit the Phoenix Project website.
Work elements of this project JPL Robotics is leading or contributing to in a major way include:
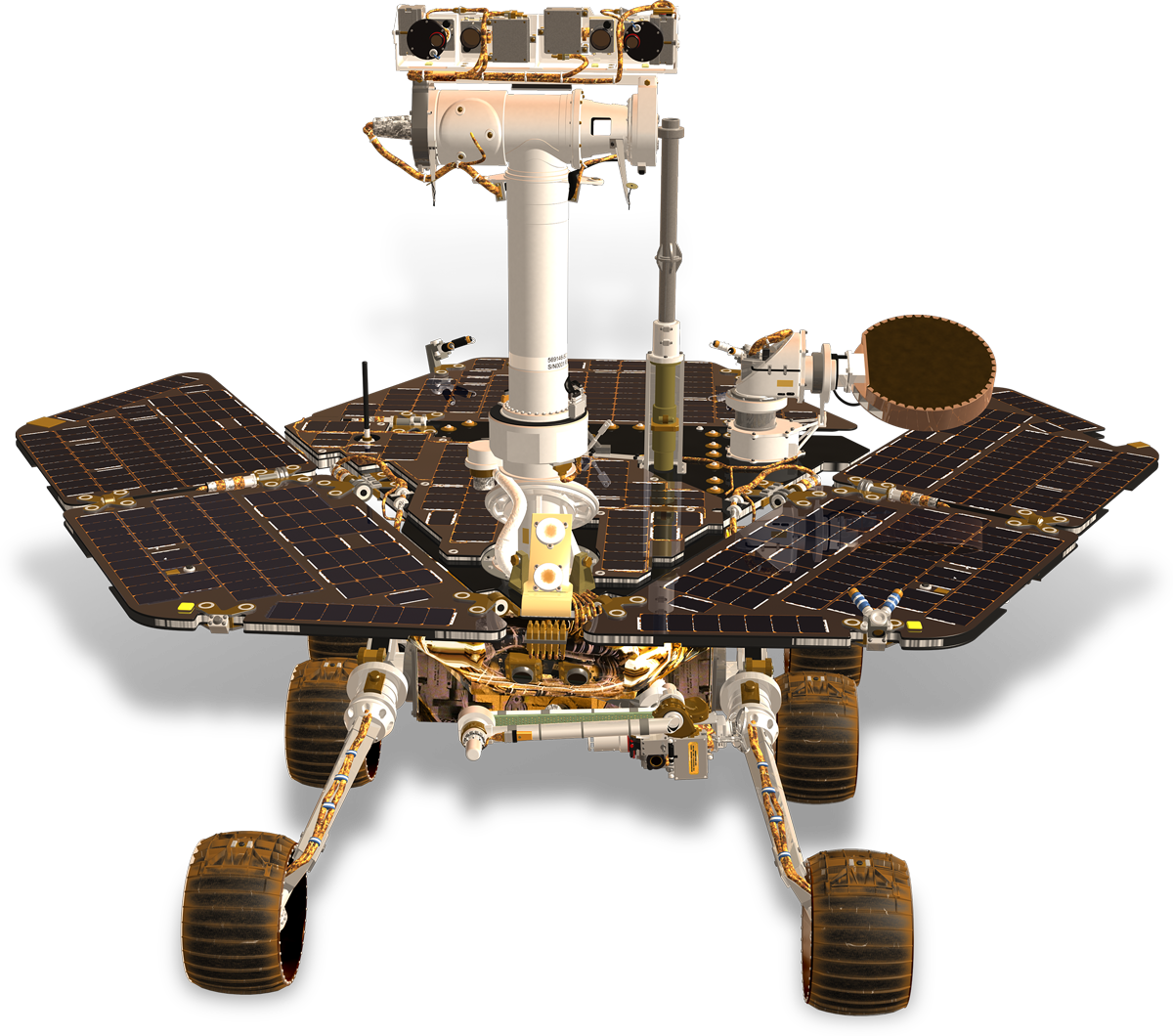
Spirit and Opportunity
The Mars Exploration Rovers Spirit and Opportunity landed on Mars in 2004. The rovers had far greater capability than the 1997 Mars Pathfinder rover. The rovers lasted far longer than their planned mission of 90 Martian solar days. Spirit until 2010 and Opportunity until 2018. Opportunity’s odometry is 28.06miles (45.16 km). The Mobility and Robotic Systems section had a significant role in the Mars Exploration Rovers (MER) project. Areas of contribution include landing, rover driving, instrument placement with the rover's arm, and ground control.
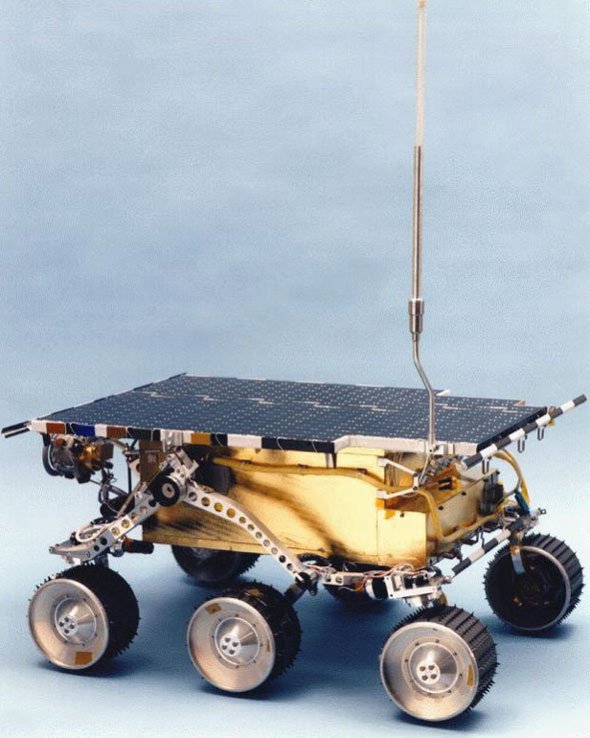
Fig. 1: The Sojourner rover at the end of its assembly and before integration to the main Pathfinder spacecraft.
In late 1996, the Mars Pathfinder spacecraft was launched from Earth. Attached to one of the lander petals and folded inside the tetrahedral landing configuration, the Sojourner Rover was a flight-experiment addition to the primary lander mission. On 4 July 1997, the Pathfinder spacecraft bounced to a stop on Mars. The spacecraft’s innovative Entry, Descent, and Landing system using heatshield, parachute, rockets, and airbags enabled a safe landing at Ares Vallis on the Mars surface.
The Sojourner rover drove off a ramp from the lander and onto the surface of the red planet the next day (sol), beginning a new era of Mars exploration by making in situ observations from an instrumented vehicle. The lander provided two critical functions for the rover's operations: It acted as a communications link from the rover to operators on Earth, and it imaged Sojourner and the surrounding terrain for the operators.
The mission ended when the lander's power system failed, eliminating it as a communication relay and stopping all interactions with the rover.
The Sojourner rover was developed around technologies developed in the years prior to the mission. A ‘rocker-bogie’ suspension system supported the main chassis distributing vehicle mass load across the six wheels. The chassis, containing the printed circuit board electronics and batteries, was thermally insulated with ultra-light aerogel. The rover carried the Alpha Proton X-Ray Spectrometer (APXS) science instrument, attached to an extendable deployment mechanism. A Material Adherence Experiment from NASA’s Glenn Research Center was also carried aboard the rover. Eleven brushed motors controlled the wheels (6), corner wheel steering (4), and instrument deployment. The rover was interconnected with the first ‘flex cable’ wiring harnesses to save mass and reduce thermal leakage from the chassis.
Sojourner was primarily solar powered, but had primary batteries which operated over the first three weeks of the mission and augmented the solar power. The rover communicated through a UHF link to the lander and had a range of 100 meters. The rover was 65 centimeters long, 48 centimeters wide, and was 30 centimeters tall, and had a mass of 10.5 Kilograms. Deployable ramps were developed for both sides of the petal allowing the selection of the best egress option for rove deployment to the surface.