
The Mobility and Robotic Systems Section has also developed a rock detection and mapping tool used to assist in selecting the Phoenix landing site. This software analyzes rock shadows in MRO HiRISE orbital images to determine size and distribution of these landing hazards. Resultant maps are then translated into safe landing probability estimates over the entire region. Based on this automated image analysis, the Phoenix landing site was modified from the original selection earlier in the mission.
Potential landing sites thought to be benign in the early stages of mission development were later seen in MRO HiRISE imagery to contain rocks large enough to damage the Phoenix lander. To assist in selecting a safe landing site, the Mobility and Robotic Systems Section developed software to automatically detect and map rock hazards from HiRISE imagery. The software starts by analyzing shadows to model size and location of rocks down to meter scale, an unprecedented level of detail for a planetary body.
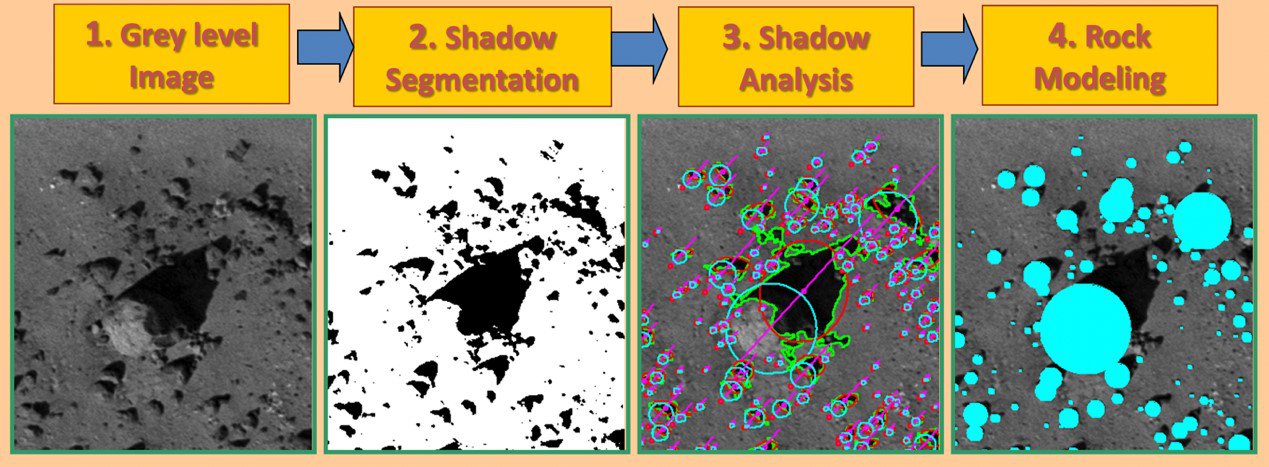
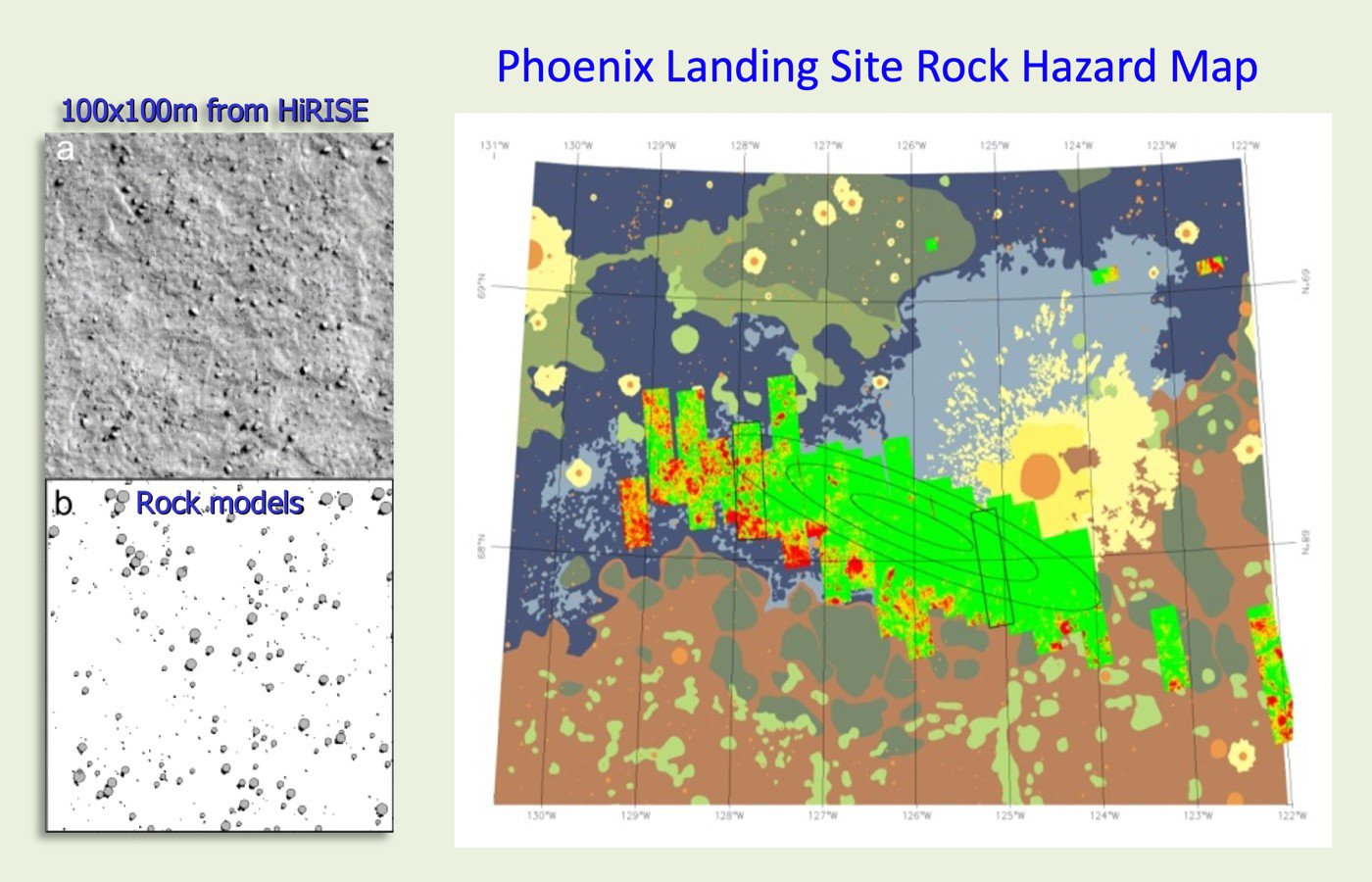
This information is synthesized into local size-frequency distributions and is ultimately used to generate a map showing probabilities of hazardous rocks in the region of interest. Based on this automated image analysis, the original landing site options selected by the mission were discarded in favor of a landing site shown to have low probability of rock hazards. The local rock abundance estimates made by the automated process were later confirmed by imagery from the Phoenix lander.
Yang Cheng and Andres Huertas Section members contributing to Phoenix