Similar to the Phoenix and InSight robotic arms, COLDArm features 4 degrees of freedom, is approximately 2 m in length, and produces a ≈40 N tip force. A variety of end effectors and small instruments are under consideration for placement at the end of the arm, including a scoop with features to collect geotechnical properties of the lunar regolith.
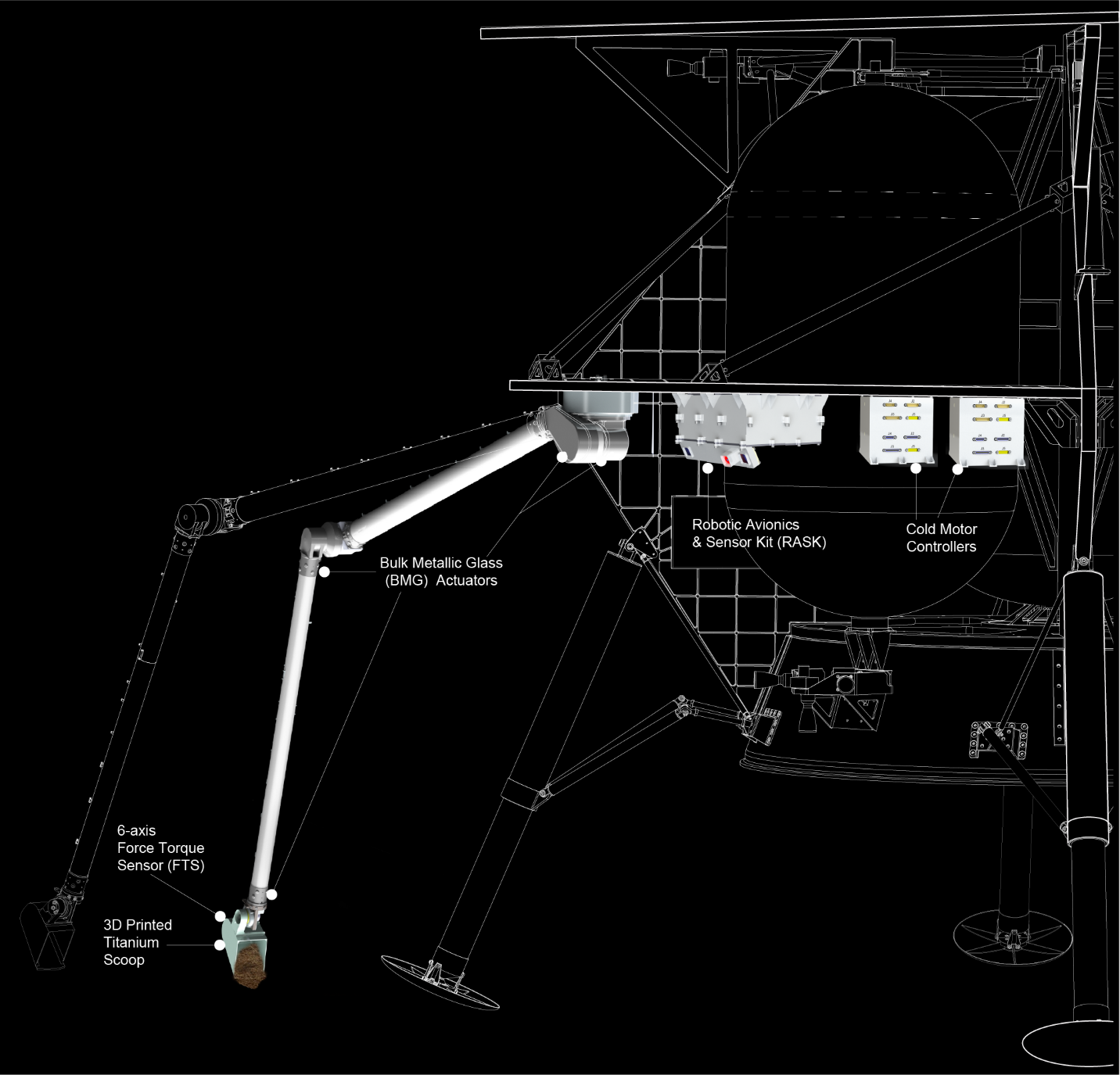
Advancements are also underway in the area of Cold Motor Controller technology. Current space rated motor controllers like those used on Mars 2020, consume power to be heated in order to survive cryogenic temperatures. The Motiv DACEE motor controllers provide down to ≈100 K operational ability without heaters. The Cold Motor Controllers are placed on the lander deck. Technological advancements also include the arm’s avionics stack that will control communications between the lander and COLDArm system and internal COLDArm subsystem communications. Referred to as the Robotic Avionics and Sensor Kit (RASK), the RASK includes an on-board processor, FPGA, communications board, power board, cameras, and 6-axis force torque sensor (FTS).
The RASK is contained in an envelope called the warm electronics box (WEB) located on the arm base plate, which is attached to the lander deck. Inside the WEB are both the avionics stack and cameras. The RASK will utilize the cameras for 3D mapping, autonomy, lunar surface imaging, and general operations. Through future software developments, the RASK could demonstrate Ocean Worlds mission enabling manipulator autonomy in an in-situ space environment.
The FTS is located at the arm end effector and will provide 6 axis load information for payload interactions, including data for fault protection. Other features of the COLDArm system include the tool changer and tool rack, which enables interchangeable payloads to utilize the COLDArm functionality during a mission. The tool changer will provide a robust, dust tolerant mechanical interface along with power and data for up to four payloads. Additional payloads would be stowed for launch in a tool rack with standard launch lock interface.
The COLDArm Project is funded through the Lunar Surface Innovation Initiative (LSII) and managed by the STMD Game Changing Development (GCD) program.
For more information about COLDArm, please contact Ryan McCormick: Ryan.L.Mccormick@jpl.nasa.gov
Credit: NASA