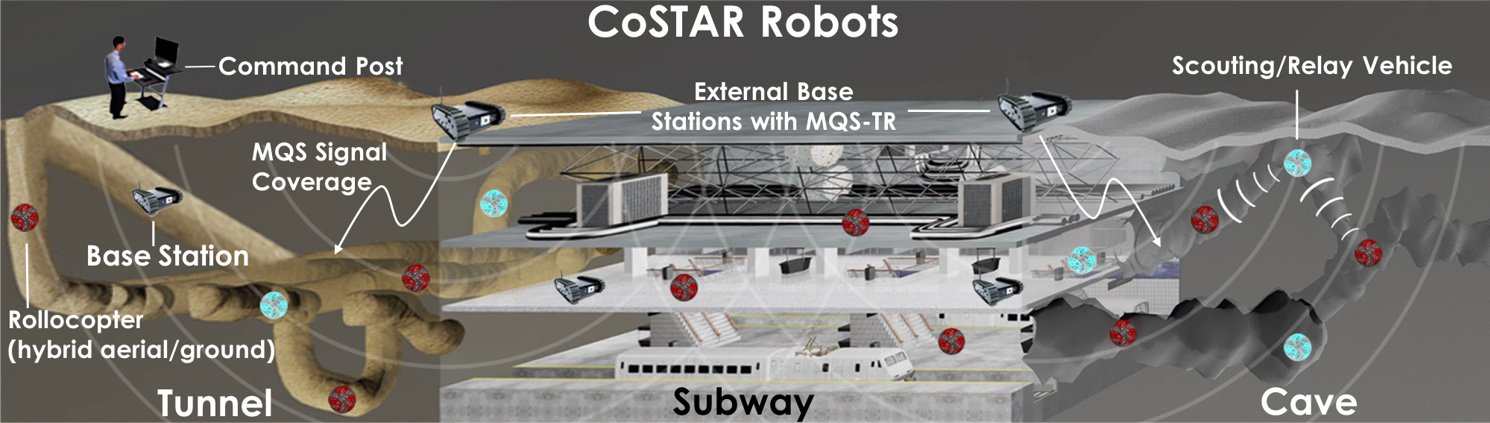
A conceptual graphical depiction of the Team CoSTAR system operating in a subterranean test course.
Team CoSTAR (Collaborative SubTerranean Autonomous Resilient Robots) is the JPL-Caltech-MIT team participating in the
DARPA Subterranean (SubT) Challenge. The objective of this robot competition is to revolutionize robotic operations in underground environments. In particular, team CoSTAR is focusing on developing next generation mobility, perception, autonomy, and communication systems for extreme underground terrain, through the development of an energy-efficient and autonomous team of multi-modal (flying, rolling, and bouncing) platforms. Such platforms will be crucial in the exploration of underground environments both for terrestrial and planetary applications. To enable robust exploration of these underground environments, team CoSTAR focuses on improved techniques for distributed and multi-robot navigation and dense mapping in order to better generate topological and geometrical representations of large underground environments.
For more information about Team CoSTAR please visit
here.
People on this Task
Ali-akbar Agha-mohammadi
Jeffrey Edlund
Benjamin Morrell
Jose Uribe