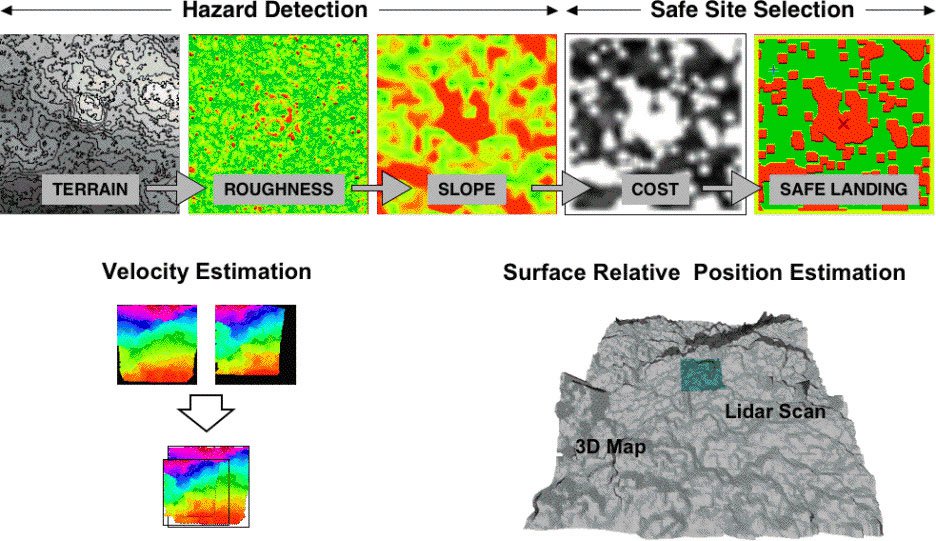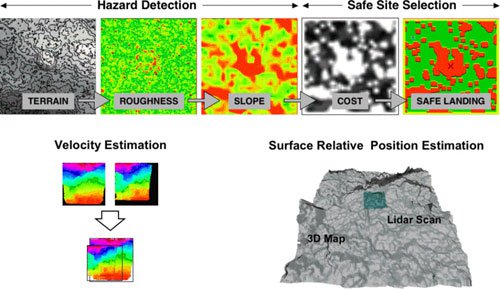
Results from LIDAR-based terrain analysis algorithms developed at JPL. The top of the figure shows the steps necessary to detect landing hazards and select a safe landing site in topographic data provided by a LIDAR. The process is called Hazard Detection and Avoidance (HDA). The bottom left shows how two LIDAR scans are aligned to estimate surface relative velocity. The image on the bottom right shows the result of aligning a small 3D scan taken by a lidar with a larger topographic map to estimate the position of the a lander relative to the desired landing site to enable Terrain Relative Navigation (TRN).
Future lunar missions will need to land near specific resources that are located in potentially hazardous terrain. This capability will be possible when landers are equipped with the ability to automatically recognize the location of the desired landing site while detecting landing hazards during the final descent to the surface. Two critical technologies that must be developed to enable this capability are an active sensor for measuring the topography of the landing site and terrain analysis algorithms. To prove that these technologies are ready for flight, they must be tested using both field tests and high fidelity Monte Carlo simulations of lunar landing. In addition the sensing and terrain analysis algorithms must be tested in the field to prove their performance in a relevant environment and to validate software models using in simulation. The final phase of testing takes place in a Hardware-in-the-Loop testbed where the landing dynamics, lunar environment, sensors and software are all present for full up real-time system testing.
This five year task is part of the Autonomous Landing and Hazard Avoidance Technology (ALHAT) program lead by Johnson Space Center (JSC) with support from the Jet Propulsion Laboratory (JPL), Langley Research Center (LaRC) and Charles Stark Draper Labs (CSDL). JPL is the lead center for field testing and terrain analysis algorithms, with responsibility for field test systems, terrain and environment models, hazard detection algorithm, and terrain relative navigation algorithm.
People on this Task
Chuck Bergh