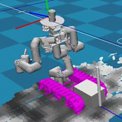
A prototype robot, Surrogate, with modular 7-DOF limbs and torso that provide humanoid dexterity.
The Supervised Remote Robot with Guided Autonomy/ Teleoperation (SURROGATE) Task focuses on the development of a common software infrastructure that can be easily adapted for any mobile manipulation based platform. The architecture is focused on semi-autonomous capabilities, finding a unique balance between complete robot autonomy and high-level supervised user input for guided control. Currently, the SURROGATE task force is developing the framework on a dual-armed, actuated torso, mobile base system (three identical 7-DOF limbs and a tracked wheel base).
People on this Task
Joseph Bowkett