Home >
Gallery >
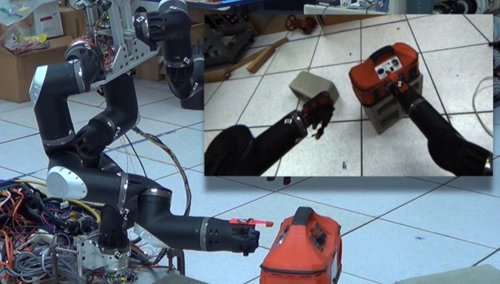
Surrogate, Instrument Panel Manipulation, 2014
Gallery
Surrogate, Instrument Panel Manipulation, 2014
04/09/2014
A short video showing the Surrogate robot being commanded to start a generator. First, the environment is perceived using stereo and lidar and a map is created and segmented. Then an operator selects the action and target on a tablet interface. Based on this, the robot plans a path and provides a preview of the planned action for confirmation by the operator. After approval and during execution of the motion, the robot uses visual tracking of fiducials to refine its motion.