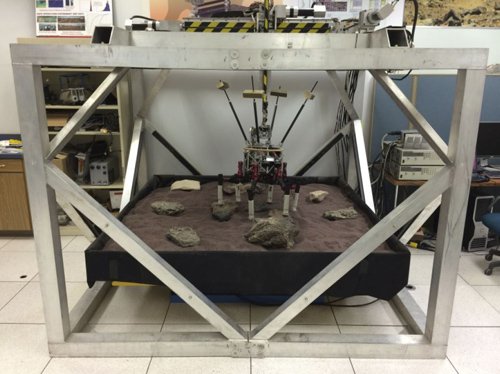
SmalBoSSE in the gantry system which provides active control to compensate for the robot weight, and passive counterbalance of gravity induced torques. The combination provides a realistic approximation of a low gravity environment for mobility testing.
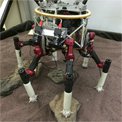
This goal of this task is to develop a multi-limbed robot capable of robust and autonomous mobility and sampling on small bodies. Several technologies will be developed that enable this goal, including: onboard 3D terrain modeling and analysis for grasping, force controlled tactile grasping, optimal gait control, and remote visual terrain traversability estimation. Two testbeds will also be implemented to evaluate the algorithms, software, and hardware developed under this task. The first of these is a micro-gravity simulation environment and the second is a 6 DOF micro-gravity gantry with terrain simulants. These testbeds will enable development and demonstration of these technologies in a relevant environment.
People on this Task
Neil Abcouwer