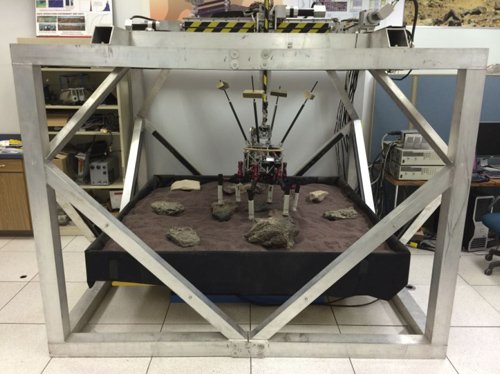
SmalBoSSE in the gantry system which provides active control to compensate for the robot weight, and passive counterbalance of gravity induced torques. The combination provides a realistic approximation of a low gravity environment for mobility testing.