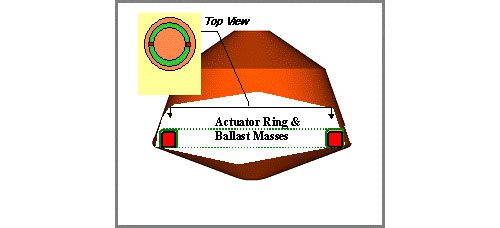
The Strap-on High-altitude Entry Reconnaissance & Precision Aeromaneuver (SHERPA) system provides a low-mass, low-power, precision delivery capability that is easily accommodated onto future Mars Scout-class landers. Our system-level concept uses two sets of strap-on assemblies, one for high-altitude sensing using a terrain imager, and another for agile hypersonic flight using a moving-mass steering device. The high-altitude sensing capability overcomes delivery knowledge errors at atmospheric entry by providing a target-relative spacecraft state estimate. It uses terrain images acquired and processed on-board using low-cost avionics. The steering device provides an agile trajectory control capability that is mechanically simple, completely internal to the vehicle, has high control authority, and is robust to mechanism failure. The SHERPA system takes a small fraction (5-10%) of the total entry vehicle system mass, and is capable of delivering payloads to within the proximity (~5 km) of a wide variety of landing sites including those at high-altitude (2.5+ km above the reference geoid).