Artists concept of a tank inspection blimp system.
The Robotic Inspection of Tanks (RIOT) task is developing prototype aerobot (blimp) robotic visual inspection systems for the interiors of large-scale offshore cargo tanks used by the Oil and Gas Industry. These tanks contain hazardous explosive atmospheres requiring the use of ‘intrinsically safe’ electrical systems inside the tank environment. The need for such systems limits the types of inspection robots to those which use very low power and incorporate a system design with power limiting, redundancy and mechanical robustness. An onboard autonomy system is necessary to enable the system to be remotely operated and overcome communication limitations and complex navigation environments.
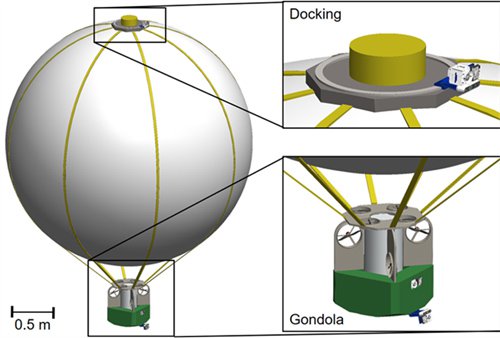
The aerobot prototypes developed by the RIOT task incorporate visual-inertial localization systems for dark environments, a low power fan mobility system, active buoyancy control, and high-performance embedded computing. These prototypes will be demonstrated in functional and end-to-end tests at JPL and in offsite warehouse environments. Early development of sensing, computing and autonomy functions has been performed on a quadrotor surrogate development platform.
People on this Task
Benjamin Morrell

