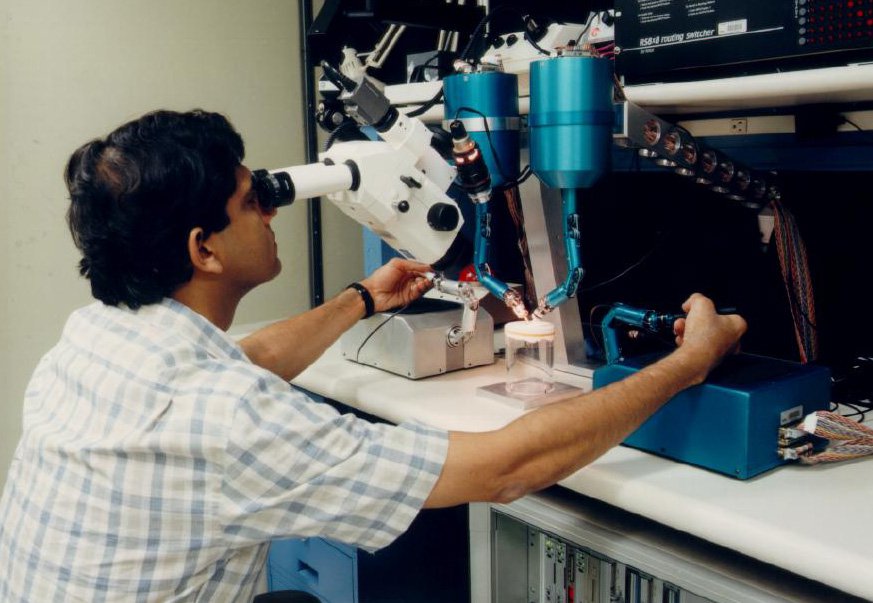
The RAMS system undergoing laboratory tests led by system developer Hari Das Nayar. Shown are two 6-DOF arms control by two 6 DOF force-reflecting haptic interfaces.
Building on its established NASA technology base in teleoperation and telerobotics, JPL collaborated with
MicroDexterity Systems Inc. (MDS) to develop a new robotic microdexterity platform with important applications to medicine. This Robot Assisted MicroSurgery (RAMS) workstation will enable new procedures of the brain, eye, ear, nose, throat, face, and hand. RAMS was designed in cooperation with leading micro-surgeons. The resulting technology developments were evaluated in actual clinical procedures. This technology was commercialized through a cooperative NASA-Industry venture with MDS. JPL's role in this collaboration was to develop and demonstrate a proof-of-concept system while MDS provided JPL with user requirements. MDS will continue to perform clinical tests, obtain regulatory approvals and commercialize this technology.
The RAMS workstation is a 6-d.o.f master-slave telemanipulator with programmable controls. The primary RAMS control mode is telemanipulation, which includes task-frame referenced manual force feedback and textural feedback. The operator will also be able to interactively designate or "share" automated control of robot trajectories. RAMS not only refines the physical scale of state-of-art microsurgical procedures, but also enable more positive outcomes for average surgeons during typical procedures -- e.g., the RAMS workstation controls include features to enhance manual positioning and tracking in the face of myoclonic jerk and tremor that limit most surgeons' fine-motion skills.
This work was funded by the NASA Telerobotics Program and it was performed in collaboration with MDS and
Dr. Steve Charles. Results from the RAMS development have been transferred to MDS for further development and commercialization.
People on this Task
Hari Nayar