Gecko Gripper combines JPL’s space rated gecko adhesive and Altius’ selectively compliant capture head to make a universal gripper that can Touch-to-Grip. The tool provides revolutionary gripping capability using ON-OFF adhesion to grab any shape – even flat plates and blankets.
Today, when a communication satellite fails, it usually means the expensive prospect of having to launch a brand new replacement communication satellite. Many of the satellites which are obsolete or have failed still have usable antennas, solar arrays and other components which are expected to last much longer than the life of the satellite, but currently there is no way to re-use them. The goal of the Phoenix program is to develop and demonstrate technologies to cooperatively harvest and re-use valuable components from retired, nonworking satellites in GEO and demonstrate the ability to make new space systems at greatly reduced cost. While the basic mission scenario posed by the Phoenix program seems amenable to preplanned operations, encounters with unmodeled or unmodelable operational targets are inevitable. Obvious examples are bent/cut structure and softgoods such as thermal blankets. A tool that can react to these situations by gripping a variety of surfaces, both rigid and soft, without the need for careful planning, is needed to assure success. The ability of that tool to grip satellite elements in non-conventional configurations during planned operations makes Gecko Gripper an essential tool for robotic servicing missions.
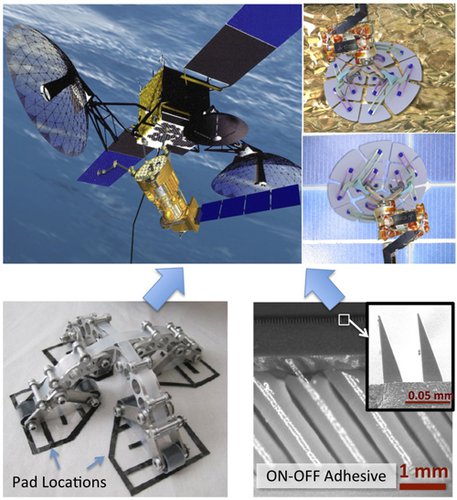
The JPL approach to this challenging problem is to team with Altius Space Machines to introduce the Gecko Gripper Tool by integrating largely pre-existing technology, giving the project high technological and programmatic flexibility while keeping costs constrained. The Gecko Gripper, illustrated in Figure 1, is an evolution of Altius’ patent-pending StickyBoom enabled by JPL’s space-rated gecko adhesive. Because the adhesive relies on van der Waals forces to adhere to surfaces, it is fundamentally insensitive to temperature, pressure, and radiation. Like the gecko, the directional asymmetry of the synthetic adhesive allows the sticking power to be turned ON and OFF using a shear force. Such an adhesive combined with StickyBoom’s arbitrary geometry mechanism should revolutionize the meaning of grasp for the Phoenix concept of operations. Gecko Gripper can grip objects that are difficult or impossible to manipulate with conventional grippers. Virtually anything it can touch, it can grip.
This work is in collaboration with Altius Space Machines, and is funded by DARPA.

