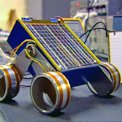
Prototype of the nanonrover, only 20cm long.
The Nanorover Technology Task is a technology development effort to create very small (10-100s of grams) but scientifically capable robotic vehicles for planetary exploration, which can easily fit within the mass and/or volume constraints of future missions to asteroids, comets, and Mars. The task objective is twofold:
- to create a useful rover system using current-generation technology including mobility, computation, power, and communications within a mass of a few hundred grams, and
- to advance selected technologies which offer breakthroughs in size reduction, mobility, or science return to enable complete rovers to be built with a mass well under 100 grams.
Key Technology Elements
- Miniaturization of all rover systems including science payload
- Computer/electronics design for operation without thermal enclosure and control
to survive ambient temperature ranges of -125C to +125C
- Miniature actuator usage and control in thermal/vacuum environments
- Mobility and navigation in low-gravity (1/100,000 of Earth) environments
- Sensing and autonomous control of rover operations
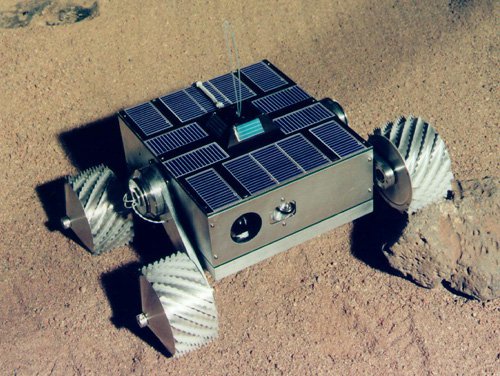
Flight ProjectThe nanorover was selected as a technology experiment on what would be the world's first asteroid sample return mission,
MUSES-C. This flight project involved collaboration between Japan's Institute of Space and Astronautical Sciences and NASA, and is scheduled for launch in 2002. The rover was to be delivered to the surface of the asteroid by the MUSES-C spacecraft where it would gather close-up imagery and spectral data, and relay this information via the spacecraft back to Earth. The rover element of the mission was referred to as MUSES-CN. In November 2000, NASA announced the cancellation of the nanorover development for MUSES-C. More information can be read in the associated
press release.
People on this Task
Todd Litwin