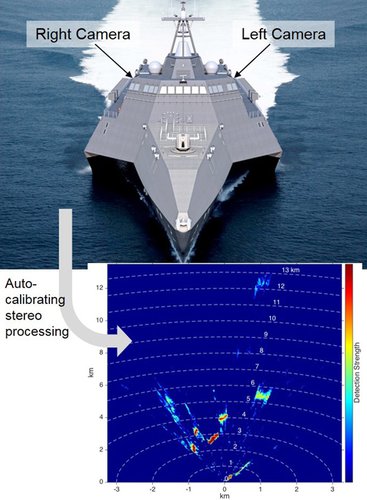
Auto calibrating stereo processing of widely-spaced ship-mounted camera imagery provides range to obstacles kilometers away.
MUSE is a long range stereo camera system for radar-free contact detection on the sea surface. The sensor uses synchronized pairs of electro-optical imagers (EO) separated by a wide baseline to detect and locate/range contacts beyond typical stereo systems. In MUSE, the cameras need not be rigidly mounted to a single surface as the software automatically determines the relative pose between the cameras for each pair of images. JPL stereo software has been modified to efficiently process high resolution image pairs quickly for use in Sea Hunter (DARPA’s ACTUV program) navigation.
People on this Task
Tyler Okamoto