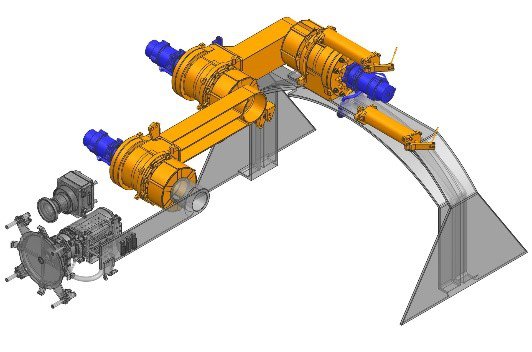
The Robotic Transfer Arm System (RTAS) task is a joint task with GSFC and JPL, and is responsible for development, systems engineering, analysis, and delivery of a robotic arm system to perform on-orbit assembly of an Orbiting Sample container (OS) into an Earth Entry Vehicle (EEV) for future return to Earth. RTAS is composed of a robotic arm, end effector, control electronics, and control software. The system is part of the Capture, Containment, and Return System (CCRS) payload on the Earth Return Orbiter (ERO), which is planned to launch in 2026 as part of the Mars Sample Return Campaign.