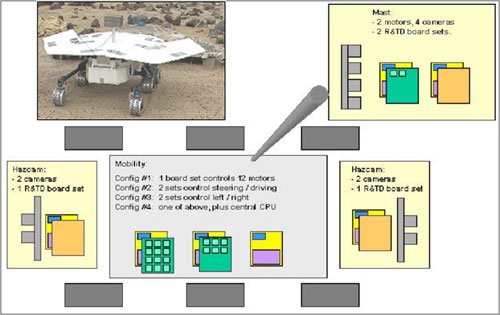
A plan view block diagram of the rover, showing the distribution of modular electronics throughout. The front, back, and mast mounted cameras have local processing, and rover central cavity has driving and steering motor control.
The objective of this task is to refurbish the mechanical chassis of the FIDO 5 test rover, populate the rover with a new low-mass, low-volume, low-power distributed avionics architecture (based on the general Mobility Avionics R&TD electronics architecture), and bring the rover up to full working status.
Future planetary surface exploration missions such as MSL are considering distributed electronics to increase reliability and redundancy in the overall flight system. The success of this task will lead to further flight acceptance of the distributed electronics approach.
This task also supports the capture of relevant rover data that will be utilized by various technology tasks to drive rover simulations. These rovers include Rocky 7, Rocky 8, and FIDO, and the rover data to be collected include mass property information, kinematic information, coordinate system definitions, etc.

