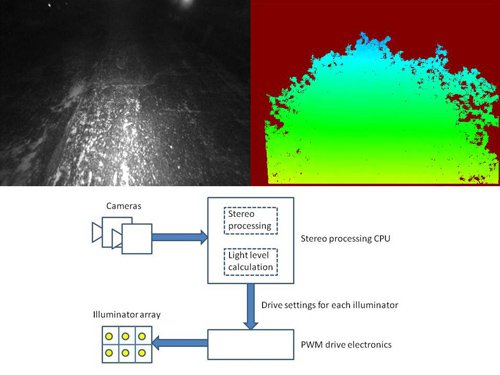
Conceptual night-time system and ranging results.
JPL will develop an Electro-Optical sensor system and navigation algorithms to enable obstacle detection and avoidance as well as localization for unmanned ground vehicle operations over a full 24 hour cycle.
A novel illumination system will allow nighttime stereo camera-based navigation and visual odometry to a range of 30m over a wide range of terrain types and operating environments. The navigation algorithms will include a pose filter capable of reliably achieving 0.5% error in distance traveled during day time over long duration (1 hour) missions with no prior maps and with no GPS coverage, and 1% during night-time. The filter will also achieve 1% error of distance traveled over 24 hours of continuous operations with sporadic GPS coverage.
The ability to see out to 30m at night enables a medium-sized vehicle (1000kg) to travel at modest speeds (30-50km/h), in off-road and on-road terrain, while avoiding obstacles and maintaining position knowledge. This is sufficient to perform missions such as transporting supplies between remote operating bases or scouting terrain, with a target range of 10-30km.
Being able to rely on sufficiently accurate relative localization from on-board sensors, with occasional (e.g. every 1km) absolute localization updates from a sensor such as GPS, eliminates the need for prior maps and the infrastructure required to acquire, maintain, and transfer the map data, substantially streamlining the vehicle’s operation.
This work is funded by the
Office of Naval Research.
People on this Task
Chuck Bergh