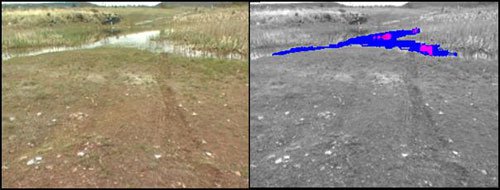
Demonstration of water detection in natural terrain. Left: pond reflecting sky and terrain. Right: detected water regions.
The goal of this task is to develop a robust water classifier for all terrain conditions during both day and night operations. This effort includes development of: robust daytime water detection, robust localization of detected water in the world map, robust nighttime water detection, and increased robustness of daytime water detection through learning.
People on this Task
Larry Matthies


