Visual range data for navigation of a small rotorcraft.
This project supports
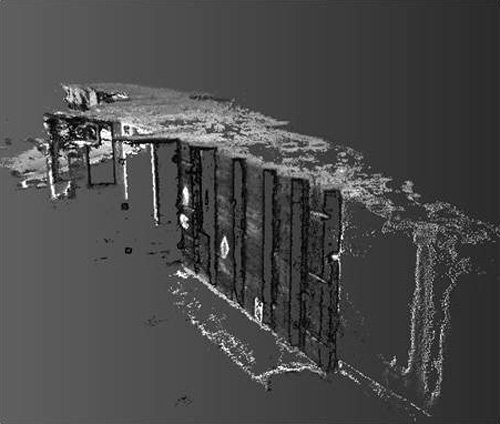
Northrop Grumman’s effort to rapidly acquire and demonstrate several capabilities for vision-aided navigation of small unmanned air vehicles (SUAVs). The goal is to develop vision algorithms for navigation of SUAVs, acquire test data with JPL’s robotic helicopter and other surrogate platforms, and demonstrate the algorithms applied to the collected data.
Development of vision algorithms includes: real-time capable 3D relative pose and scale estimation algorithms; real-time capable covariance estimation algorithms; algorithms to monitor the robustness and integrity of the vision-based estimates; a map localization algorithm; and a SLAM algorithm.
People on this Task
Larry Matthies

