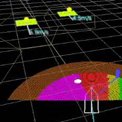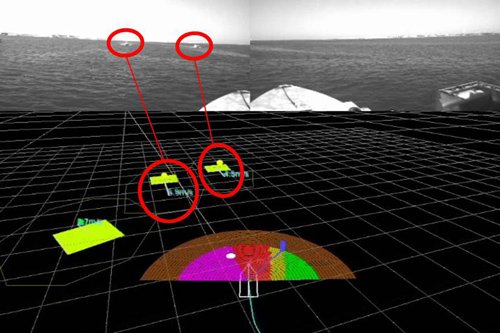
Long range stereo perception detects the presence of other boats which are moving obstacles. Red indicates driving directions which will result in a collision, purple indicates directions disallowed by the COLREGS, and green indicates good driving directions.
ONR will demonstrate autonomous operations of an Unmanned Sea Surface Vehicle (USSV) for support of Littoral Combat Ship (LCS) operations using JPL autonomy technologies, which includes JPL-developed hybrid control architecture CARACaS (Control Architecture for Robotic Agent Control and Sensing) with low-level control and high-level reasoning capabilities; machine vision technologies for hazard avoidance and object detection; and embedded, real-time operations on an electronic control stack. The objective of this project is to develop and demonstrate advanced behaviors and capabilities for intelligent mission-level autonomous control and long duration operation of a USSV for LCS support. We have demonstrated several capabilities including: SII (Search, Intercept, and Inspect); contact discrimination based on their motion; safe navigation obeying COLREGS with multiple traffic boats; and mission replanning based on hardware fault.
This work is funded by the
Office of Naval Research.