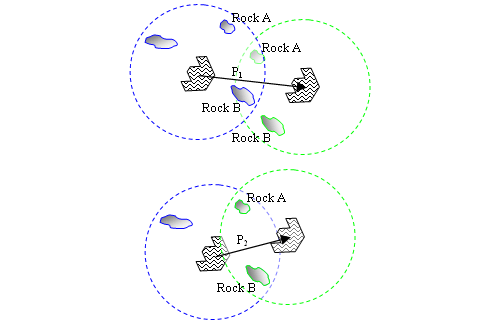
Alignment of two overhead mosaics of surface images taken from two different rover positions. Above: miscorrelation of surface features (Rocks A and B) from localization error. Below: improved correlation of surface features and estimated rover position after manual image alignment.
During any traverse of a rover across the Martian surface, many details of geologic observations must be recorded. The locations of science targets that lie in the traverse direction must be propagated forward into the scenes that will be assembled from future images, and the information must be made available to many scientists and planners on a daily (tactical) basis. All these geometric requirements for plotting observations in a map view are dependent on accurate rover location.
This effort will provide refinements in tactical information processing and forward propagation of position and targeting information. The result will be a boost in the efficiency of tactical decision-making, and refinement of the use of valuable vehicle time resources during future surface missions. Currently many aspects of the surface science at Mars are suboptimal due to the unknowns associated with the environment and the limitations of doing field geology with remote robotic vehicles. This project promises a means of increasing the knowledge of rover position and position of associated observed targets. This information supports increased knowledge of the geologic setting, and the questions that may be addressed. The objectives of this project specifically include:
- Development of target harvesting technology to enable rapid semi-automated refinement of estimated vehicle location
- Development of a tool for creating geologically accurate overhead image mosaics and aligning them for geologic mapping
- Integration of corrected vehicle location estimates into tools for science observation planning and targeting
- Comparison and evaluation of the performance and accuracy of both vehicle position correction techniques: (target harvesting, overhead mosaic alignment for geologic mapping)
- Publication of resulting geometric information in OpenGIS format for dissemination to the global planetary science community.
This work is funded by the NASA
Applied Information Systems Research (AISR) program.