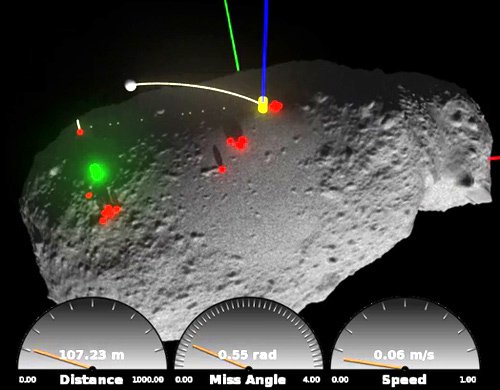
Simulating ballistic trajectories on a small planetary body with non-uniform gravity using a polyhedral gravity model.
The Surface Exploration Analysis and Simulation (SEAS) task uses physics-based simulations to explore potential surface and near-surface mission operations at Near Earth Objects (NEOs) and other planetary bodies. Developed at JPL, the simulator can be used to provide detailed analysis of a variety of surface and near-surface NEO robotic and human exploration concepts.
The SEAS simulator incorporates high-fidelity models of the NEO environment including its irregular geometry, the gravity field, and the effect of perturbing forces such as other body gravity fields and solar pressure. A local regolith model consisting of many individual irregular particles interacting through friction and cohesive forces can be used to model the details of contact events at or below the NEO surface. The NEO orbit is propagated from planetary ephemerides data and the option is available to model its rotation using either a kinematic or dynamics model. The spacecraft trajectory is propagated in the low-gravity field of the NEO and the simulation is capable of providing collision and line-of-sight information between the spacecraft, NEO and other objects. Representative NEO models based upon the Itokawa and Eros NEOs are currently in use within the simulation and a Phobos model is also under development. Spacecraft and surface assets at the NEO are modeled with full multi-body dynamics and include models for spacecraft devices such as thrusters, reaction wheels, Inertial Measurement Units (IMUs), star-trackers, tethers and anchors. Illumination from the sun is modeled to allow synthesis of images from surface viewing navigation cameras. Standard spacecraft Guidance, Navigation and Control (GNC) functions are incorporated into the simulation to provide attitude and position control.
This NEO simulation is based upon the DSENDS spacecraft-modeling tool available at JPL that has been previously used on such missions as the Mars Phoenix Lander. Studies being conducted with this simulator in the NEO context include spacecraft-mounted arms performing contact and surface sampling activities, a surface hopping robots landing interactions with the surface, iterative guidance laws for surface hopping mobility, regular and irregular orbits, station-keeping at various distances and periods, visualization of the surface and near-surface gravity fields, approach guidance simulation, tethered free-flying operations, evolution of dust plume/ejecta arising from surface operations, and anchoring of surface assets. SEAS will also develop technologies to analyze and simulate combined human-robot operations for low-Earth orbit International Space Station and near-Earth servicing and assembly missions.
People on this Task
Hari Nayar