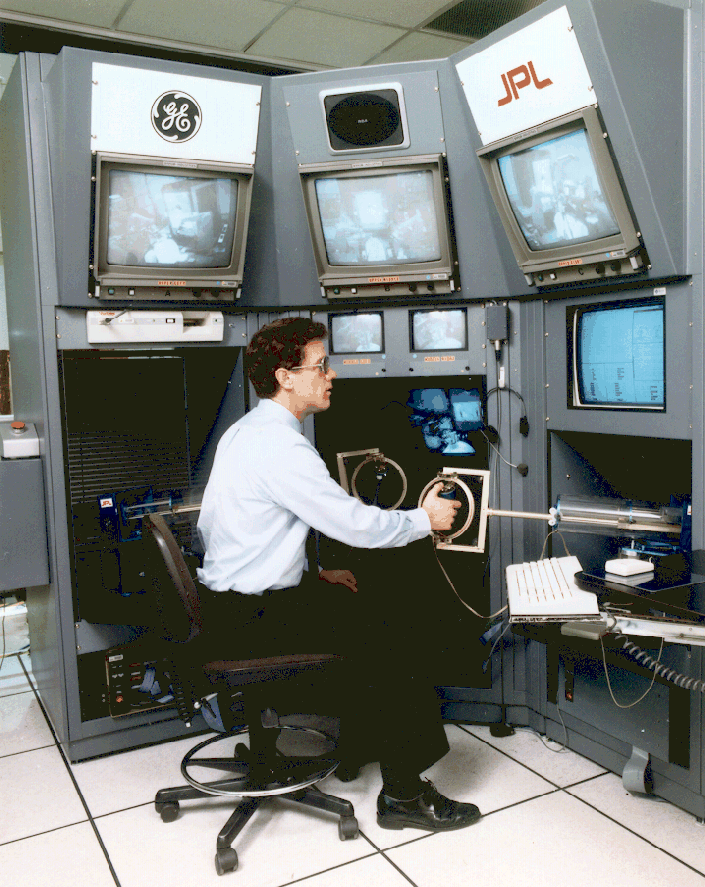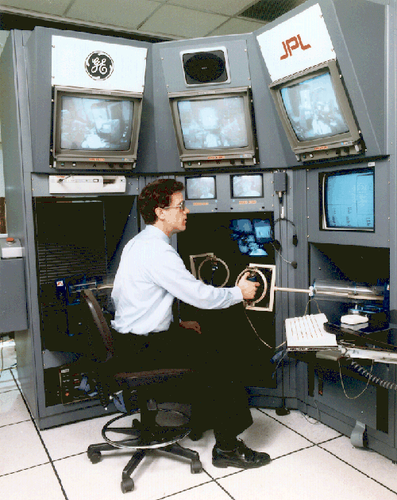
An operator uses force reflecting hand controllers to guide the performance of remote manipulation tasks.
The Supervisory Telerobotics (STELER) Laboratory provides a technology development and demonstration site for telerobotics technology. The focus for the technology developed in the STELER lab is on telerobotics architectures, supervised autonomy and autonomous control, and on the development of complete integrated systems. In supervised autonomy, commands are generated at an operator control station and sent for autonomous execution at a separate robot control system.
Various component technologies have been developed and integrated to support the application domains. Generalized Compliant Motion was developed to provide autonomous multi-sensor based control. This was enhanced for dual-arm cooperative control with the development of Dual-Arm Generalized Compliant Motion. The Modular Telerobot Task Execution System (MOTES) was developed as a prototype space-based robot control system. Extended Task Space Control was developed to provide emergent control behavior for a redundant manipulator based upon multiple simultaneous behavior execution. The User Macro Interface (UMI) operator interface was developed to generate command sequences, verify them through simulation, and send them for execution on the remote robot control system. Operator Coached Machine Vision (OCMV) technology was developed to allow calibration of the geometrical model with the real environment.
Technologies for various applications domains have been developed and demonstrated in the STELER lab. Ground control telerobotics for the Space Station was developed and demonstrated. Single and dual-arm telerobotics for satellite servicing was demonstrated. The telerobotics technology was applied to aircraft remanufacturing through the development of a generic telerobotics architecture for aircraft remanufacturing. Application of ground control telerobotics for tending of space science experiments where the manipulators are mounted internal to the experiments was studied with focus on a biology experiment and a plant chamber experiment.