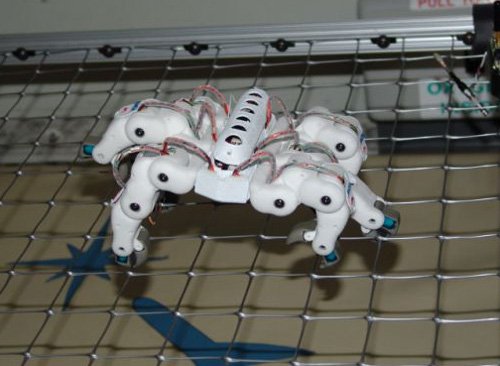
The mesh crawling version of Spiderbot was developed and tested for low gravity mobility in structured environments.
Large robots use large actuators to build large structures. Fine work requires small, precise actuators and often small robots that can fit into confined spaces. Spiderbots can provide the small chassis and the mobility to support this second type of work. The Spiderbot is designed to develop and demonstrate hexapods that can walk on flat surfaces, crawl on meshes, and assemble simple structures. The task's current mission is to demonstrate complex mobility behaviors, including maneuvering (i.e. mesh crawling) in a space analog environment (i.e. micro-gravity).






