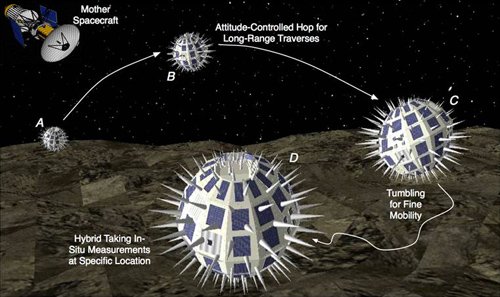
Once deployed, the hybrids would perform attitude-controlled hops for long-range traverses (steps A to B to C in the figure) and would tumble to reach specific locations (steps C to D in the figure).
In this effort, JPL will develop a mission architecture that allows the systematic and affordable in situ exploration of small Solar System bodies such as asteroids, comets, and Martian moons. The proposed mission architecture stems from a paradigm-shifting approach whereby small bodies' low gravity is directly exploited in the design process, rather than being faced as a constraint. At a general level, a mother spacecraft deploys on the surface of a small body one or more mobility platforms, each sealed in one enclosure and with minimal internal actuation, critically enabled by the micro-gravity environment. Each mobility platform can perform either 1) long excursions by hopping, or 2) short traverses to specific locations through a sequence of controlled tumbles, or 3) high-altitude, attitude-controlled ballistic flight akin to spacecraft flight. The proposed robotic platforms would behave as spacecraft/rover hybrids, capable of accessing most destinations on virtually any small body. The minimalism and motion capabilities of such spacecraft/rover hybrids would allow multi-asset missions where not only specific targets on small bodies' surface could be closely observed, sampled, and cached, but also high-risk, high-payoff measurements could be taken (since the loss of one hybrid would not spell the end of the mission). Such architecture would enable a plethora of affordable and scientifically important missions, ranging from the exploration of active comets, to the detailed analysis of wet asteroids, to the emulation of astronauts with manned maneuvering units.
This work is funded by the
NASA OCT NIAC program.