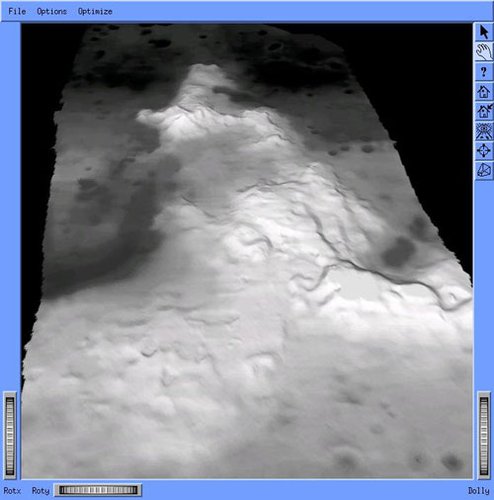
MER Gusev crater data in Simscape.
This task will architect and develop an integrated environment modeling capability - SimScape (Simulator of Surface Caharacteristics and Attributes for Planetary Environments). This integrated capability will combine existing environment modeling capabilities to seamlessly meet the needs of rover and instrument simulations, and provide users with standard interfaces for defining and using the environment models. SimScape will encompass: an application interface, an environment server, and synthesis algorithms for generating virtual environments. During the initial phase the first two items will be emphasized in order to create a consistent software framework. In future work, the emphasis will be shifted to the virtual environment generation area so that more complex surface interaction and science observations can be simulated.