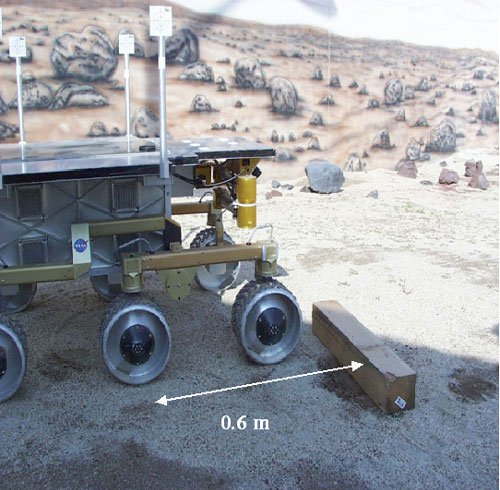
Driving over obstacle test setup.
NASA proposes to develop and to launch a roving long-range, long-duration science laboratory that will be a major leap in surface measurements and pave the way for a future sample return mission. NASA is studying options to launch this mobile science laboratory mission as early as 2009. Some advanced surface navigation technologies may be needed to attain mission goals.
This task will develop, test and validate the components and integrated system concepts for rover navigation. These components include localization algorithms, local/global path planning, local/global obstacle detection/avoidance, and global path planning, among others. The main focus of this task is testing and validation, but some development will occur on an as needed basis as dictated by the MSL project. Testing and validation will be achieved using a combination of simulation and field environments, with simulated testing preceding the field deployment.
During FY06, this task will continue Mars Exploration Rover (MER, 2003 launch) GESTALT navigation assessment, this time on non-zero slope terrain with varying densities of rock size-frequency distributions as dictated by Mars Science Laboratory (MSL, 2009 launch) Surface Mobility Requirements, i.e., on slopes up to 30 degrees and in rock fields with percent coverages up to 20%. In addition, updated visual odometry (VO) will be integrated into the rover sofftware and MER GESTALT will be tested in the above described terrains with and without VO active to allow comparison of performance with and without VO motion estimation updates.