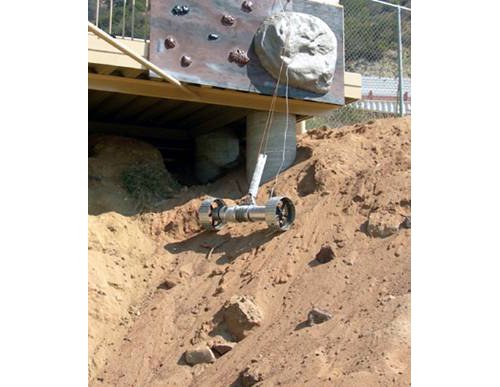
Preliminary tests of Axel descending a steep slope in the JPL MarsYard.
Crater promontories and vertical strata are generally inaccessible to state-of-the art surface explorers and their in situ science instruments. Lander platforms, such as the Viking Landers, the Mars Polar Lander, and the Phoenix Mission Lander, were all equipped with robotic arms that have access to a small region of the surface defined by the arm's workspace. Rover platforms, such as Spirit and Opportunity, have demonstrated great traverses distances of several kilometers across the Martian surface. However, they have limited capability for accessing slopes exceeding 30 degrees. Accessing vertical strata off promontories remain out of reach for current state-of-the-art robotic platforms and their instruments.
Our specific objectives are to demonstrate the descent of a single tethered rover from a stationary lander over crater promontories with slopes reaching up to 90 degrees, the collection of multiple samples, and the return of the samples to the lander for further analysis.
Axel uses a symmetrical design with minimal complexity. It is fundamentally a two-wheeled rover with an actuated link that serves several purposes including reeling the tether, adjusting the rover's pitch for pointing its sensors, and controlling the sampling tool. Using only three actuators, Axel is capable of a full range of motions including operating upside-down or right-side-up and tolerating strong impacts. It is also capable of driving on flat and sloped terrains. On sloped terrain, Axel operates like a yoyo reeling and unreeling its own tether to prevent its shearing against the crater's edge during the descent. Consequently, only a fixed hook is necessary to connect Axel's tether to the host. With a passive sampling mechanism, Axel can collect samples with the same three actuators. In addition to its simplicity and robustness, other benefits include ready support for different wheel types and sizes, and its compactness for flight.

