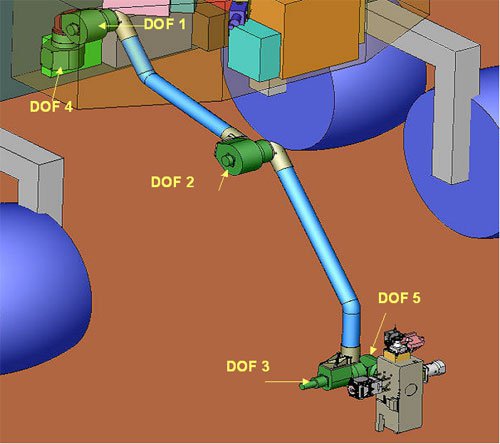
One of several alternative manipulator designs considered for the Mars Science Laboratory Rover Project.
The MSL mission will be the first to acquire samples with a rover. It is expected to have one or more rover-mounted manipulator arms that place instruments -- such as imagers, contact science instruments, surface preparation tools, and sampling tools -- on surface targets.
The manipulator arms need to be designed to enable use of these instruments, and to deposit samples in a processing and analysis system on the rover's body. They need instrument placement technologies, such as collision-free path planning, to accurately and safely place instruments on the targets. And they need technologies to control the interaction force between instrument and environment for contact science and sample acquisition.
We are developing the technologies MSL will need for such sample acquisition. To save time and therefore increase science return, we are developing technologies to enable arm activities to follow rover motions as part of one uplink command sequence. Currently, arm motions require a new command sequence, and the associated delay of one sol (a Martian day), after a rover motion.

