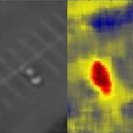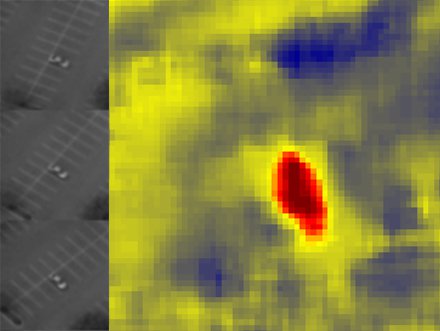
Elevation map of a parked car obtained from multiple images.
This task will develop image understanding algorithms to exploit information found in persistent aerial wide area surveillance imagery. The algorithms and techniques developed by this effort will be leveraged to pursue work in reimbursable tasks. In the first year of this effort, 3D data derived from multiple images was fused with intensity imagery to improve parked car detection. The second year of the task will develop detection and tracking of people and the third year will develop line of sight analysis by exploiting 3D information and people locations to infer intent.