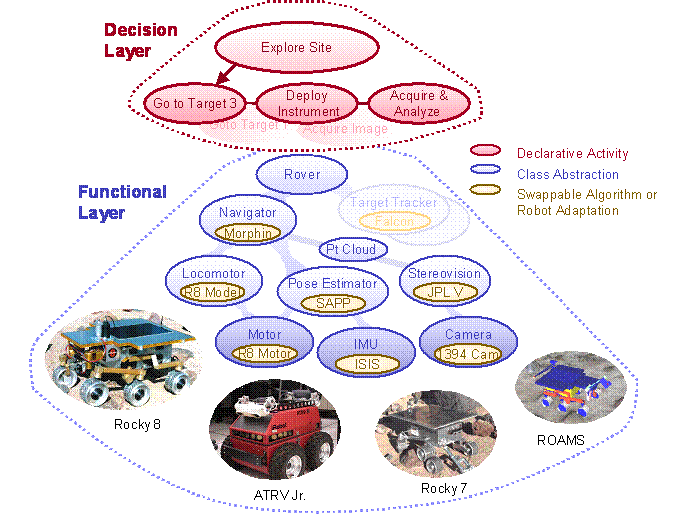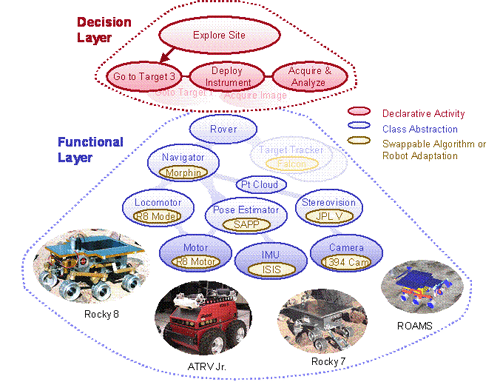
A schematic representation of CLARAtys layered component architecture.
CLARAty (Coupled Layer Architecture for Robotic Autonomy) is a reusable robotic software framework for the integration and deployment of new technologies onto robotic platforms. This task develops generic robotic software that either refactors or encapsulates component technologies developed at JPL, other NASA centers, and partnering universities. It also provides and support adaptations of this generic framework for the Rocky 8, FIDO, and Rocky 7 rovers.
CLARAty is designed for the integration, validation, and maturation of various robotic research technologies. First, is the lack of a common robotic software architecture that will provide a framework for technology integration. Without this framework, research teams have been hampered by the need for re-implementing and testing all system functionality on smaller, non-flight-like robotic platforms. Researchers often lack software systems which drive their problem solving by accurately reflecting flight complexities. Second, is the lack of a common software architecture spanning parallel research efforts. Without this, each effort is weakened by having to apply some portion of its limited resources to solving all subsystem problems, instead of leveraging solutions from outside their immediate effort. Third, is the disconnection between work performed in the Artificial Intelligence and Robotics fields. Separate work on problems solutions and software for these fields has commonly resulted in a patchwork of software implementations that never realize the potential of each of these domains, and what they can provide for each other.
CLARAty is a collaborative effort among two Divisions at JPL, NASA Ames Research Center, Carnegie Mellon, and University of Minnesota. It also draws on expertise and contributions from participating universities within the Mars Technology Program (MTP). CLARAty builds upon decades of robotic experience at JPL.
People on this Task
Hari Nayar