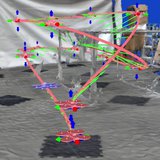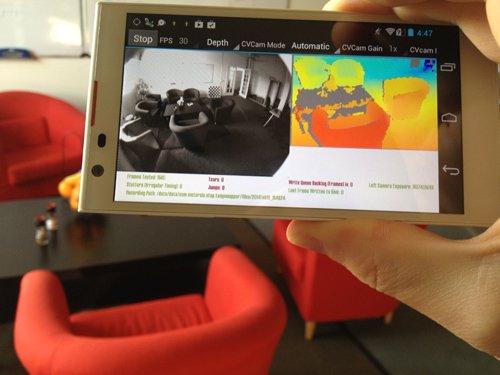
JPL Robotics vision software running on the Tango development platform. On the left is shown the monocular black and white image of the scene, and on the right is the color-coded depth map computed by JPL stereo vision software.
JPL Robotics is funded by Google as part of a multi-institutional
Project Tango to develop smartphone-based indoor three dimensional mapping. The objective is to use everyday mobile devices for environment imaging and inertial measurement to map the surroundings and estimate positions with up to millimeter accuracy.
A core aspect of a mobile robot is the ability to determine its own pose and build a map of the environment. Robust real-time visual SLAM and 3D mapping have been a major challenge of robotics and computer vision. But advancements in computing power enable implementation of 3D pose estimation and map building in mobile devices. Project Tango aims to bring this technology to the public in the form of smart phones which can me used to
map the planet.
JPL Robotics is responsible for building accurate and consistent 3D maps for Project Tango. This includes constructing detailed textured models of indoor spaces in real-time and on memory constrained systems. Significant effort is spent implementing fault-detection and addressing underlying software engineering challenges. Possible future activities include interpreting previously built 3D maps, such as labeling different parts of the building and utilizing the device for robotics applications, or as perception with an eye-in-hand camera for robotic manipulation.