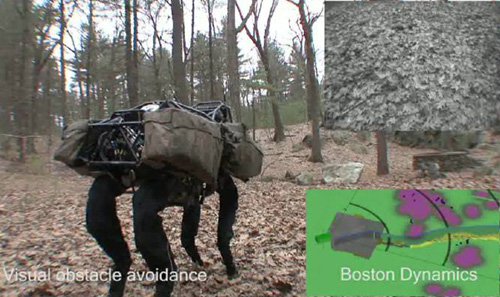
A screen shot of a video showing Boston Dynamics BigDog robot using a JPL perception system to see large rocks as an obstacle in its path and plan a route to avoid them.
JPL will develop the perceptual subsystems for
DARPA’s Legged Squad Support System (LS3), which is based on the previous
Boston Dynamics’ BigDog design. The perceptual systems will include local terrain mapping and dynamic obstacle detection and tracking. Additionally, JPL will support the selection of sensors and processing hardware, develop processing algorithms, and support the integration and testing of these algorithms on a legged vehicle.
The local terrain mapping module builds a high-resolution map of nearby terrain that will remain centered on the vehicle as it moves through the world and is used to guide gait selection and foot-fall planning. JPL will improve the performance of this system by enhancing the sensor suite and algorithms (to permit day/night operation in a wide range of environments) and extending the local terrain classification algorithms (to identify negative obstacles, water and vegetation).
JPL will also improve the performance of the dynamic obstacle module (through increasing sensor’s field-of-view and extending target detection ranges), which will enhance the LS3’s ability to detect and track pedestrians in the vicinity of the robot, and ensure vehicle safety when operating in close proximity with soldiers and civilians.

