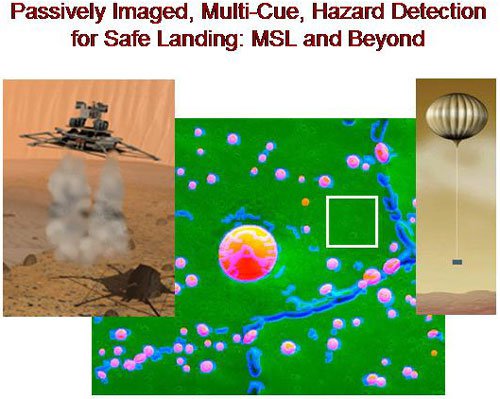
Image processing results for crater detection (center), flanked by next generation Mars lander (left) and balloon (right) concepts.
We are developing a passive-imaging-based, multi-cue HDA system for Mars and other lander missions. This is the first passively imaged HDA system that will seamlessly integrate multiple algorithms (crater detection, slope estimation and texture analysis) and multiple cues (crater morphology, rock distribution, and slope from shading) to detect a variety of landing hazards (craters, steep slopes, discontinuities and rocks) in real time.
The system will be able to operate under Mars EDL constraints for computing power, speed, and hazard detection robustness. Real-time passive-imaging hazard detection is a critically needed technology for many NASA missions. The use of smaller (0.3 L), power-efficient (3 W) and lighter (0.3 Kg) passive sensing for HDA to replace the large (400 L), heavy (25 Kg) and power-hungry (200 W) active EDL HDA sensor (the phased array terrain radar) currently baselined for MSL, will be a major advance.
In fact, this development will truly enable small, low-cost missions, such as Mars Scout missions, to carry an HDA system. It will also enhance large missions, such as Mars Sample Return, by allowing the saved EDL HDA sensor payload (up to 25 Kg) to be allocated for other critical instruments.
This task specifically addresses the need for algorithms to interpret sensor data, detect and/or avoid hazards and/or select sites that are safe and traversable by rovers.
This is a two-phase task. In the first phase, a crater-hazard detection subsystem is developed that will improve the speed (from 0.05 Hz to 0.5 Hz) and performance (from ~90% to 99% detection rate) of an existing crater-detection algorithm that is currently baselined as the backup HDA system for MSL. In the second phase, the discontinuity, steep-slope, and rock-detection algorithms are developed to make a full HDA system.


