Future Mars exploration missions will require rovers to navigate in dense, rocky, and sloped terrain. This task, jointly conducted by MIT and JPL, is developing methods for enhanced navigation in such terrain, based on integration of improved local navigation/control techniques and multi-sensor terrain classification methods.
Specifically, we are developing:
- Improved hazard detection and stereo-vision algorithms to robustly detect steps, holes, wheel traps, and other hazards.
- Improved algorithms for navigation planning, trajectory generation, and precise trajectory following in challenging terrain.
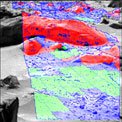
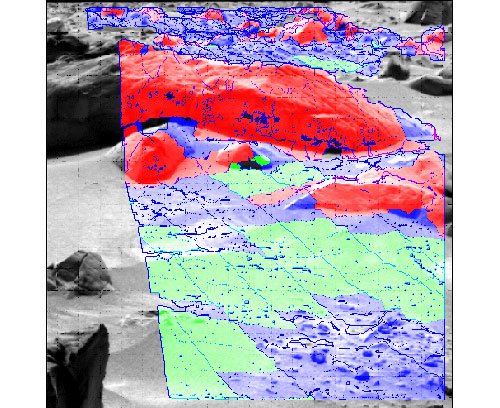
- Improved sensor-processing algorithms that use wheel slippage and sinkage measurements, vibration sensing, and multispectral visible, near-infrared, and thermal-infrared remote sensing to estimate terrain mechanical properties, learn associations between the contact and non-contact (i.e. remotely sensed) observables, and thereby remotely classify regions of terrain with similar traversability characteristics.
The multi-sensor terrain classification method is integrated with the advanced rover navigation work to allow rovers to navigate safely, accurately, and efficiently in very rough terrain, and to use multiple sensors to estimate and map terrain properties in the process. The algorithms developed through this effort are integrated into the CLARAty software architecture and experimentally validated on MIT and JPL rovers in a variety of Mars-analog environments. The results of this work will have potential for insertion into the onboard and ground-operations software for MSL, as well as potential for much greater impact on the onboard software for rover missions beyond MSL.
JPL has a Co-Investigator role for this effort, which is led by PI
Steve Dubowsky of MIT.