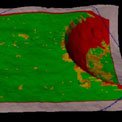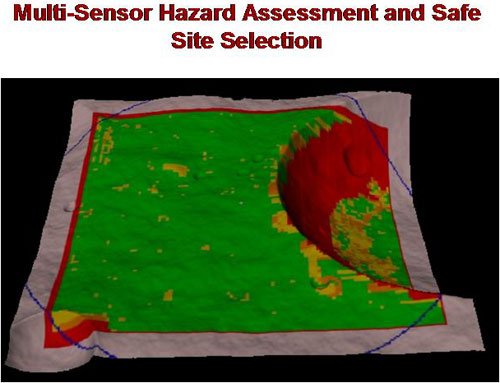
Color coding of an elevation map to show safe (green) and unsafe (red) landing areas.
We are developing and validating the core technologies needed to enable autonomous safe landing of a spacecraft on a planetary surface, using multiple active and passive sensors. An innovative feature of this task is the development, for the first time, of an on-board automated reasoning system for safe landing.
The core technologies we are developing are multi-sensor hazard assessment and science-driven safe-site selection. They are being integrated and demonstrated by extensive graphical computer simulations. Using Monte Carlo simulations, quantitative measures of performance of the algorithms are being developed, and the benefits of multi-sensor versus single-sensor for safe landing is being quantified.
Two unique aspects of the proposed research are: (1) uncertainty management in multi-sensor fusion of terrain data, and (2) incorporation of the mission's science requirements in selection of safe landing sites. These represent major advances over the state-of-the-art (SOA) in hazard detection and avoidance. For hazard detection, the SOA uses a single terrain sensor with binary thresholding for terrain evaluation. Our task fuses multiple heterogeneous sensors for safety evaluation using classes of terrain safety.
For hazard avoidance, our approach incorporates both the spacecraft control constraints and the mission's science requirements in the selection of the final landing site, whereas neither of these factors are considered in the SOA. The developed capabilities will enable the spacecraft to land safely in more-challenging planetary regions with scientifically interesting terrain features. These techniques are computationally fast and are suitable for real-time implementation on flight computers.
The developed techniques are being tested and evaluated in a graphical simulation environment using actual Martian terrain data and flight sensor characteristics. This environment is being used to perform trade studies exploring several alternatives for sensors applied to different types of Martian terrains. Monte Carlo simulation is being used to quantify the performance of the algorithms in statistical terms with a variety of sensor parameters, terrain types, and environmental conditions, as well as to compare multi-sensor and single-sensor performances.
At the completion of the task, full documentation will be delivered covering methods, algorithms, software, and simulation test results. A major deliverable is a comparative statistical analysis of using multiple sensors versus a single sensor for safe landing in different regions of Mars. This information is not currently available and will be highly beneficial to NASA mission designers in planning future exploration missions to Mars.