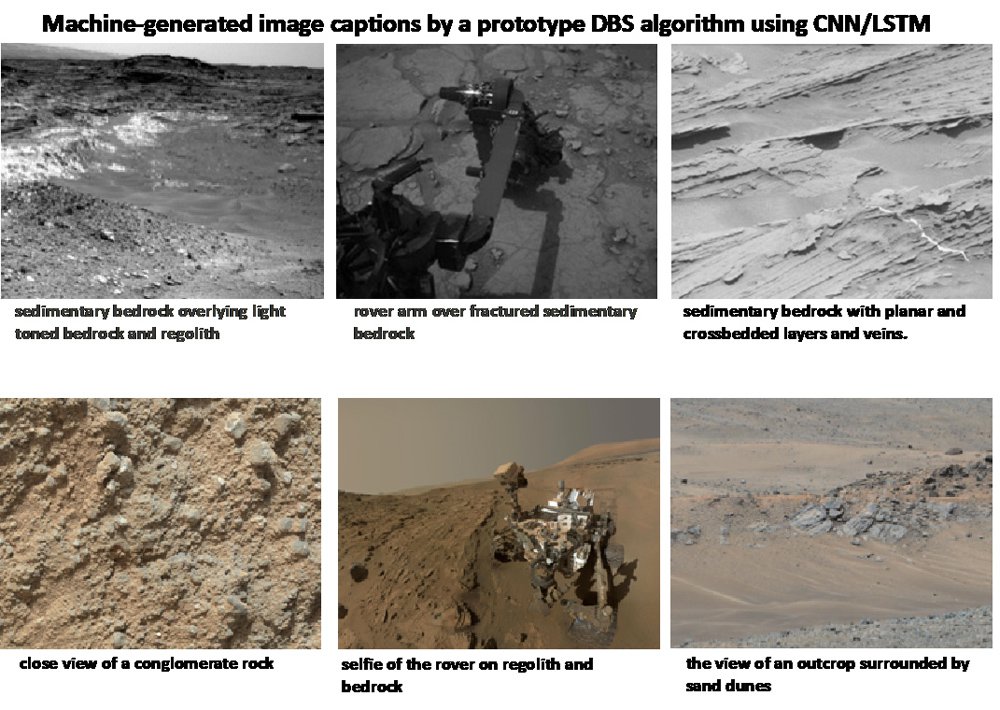
Machine-generated image captions by a prototype Drive-By Science algorithm using a Convolutional Neural Network with Long Short-Term Memory.
Terrestrial high-performance computing has enabled incredible breakthroughs in autonomous vehicle navigation, machine learning, and data analysis for Earth-based applications. The main roadblock to a Mars exploration rollout of such advances is that the best computers are on Earth, while the most valuable data is located on Mars. High Performance Spaceflight Computing (HPSC) will enable a vast suite of new mission concepts, attainable science goals, and unprecedented state monitoring and autonomy. However, enhanced onboard processing cannot have a significant positive impact on mission productivity and science yield without sophisticated and robust flight software.
The MAARS task seeks to bring together JPL’s developing HPSC capabilities, innovative onboard autonomy, and novel mission concepts. In particular, two novel capabilities for future Mars rovers are being developed: Drive-By Science (DBS) and Energy-Optimal AutoNav (EOA). At the moment, with an exponentially growing size of data generated by on-board instruments, opportunities for science discoveries could be lost due to the limited data transmission capacity between Earth and Mars. DBS seeks to prevent such losses through an on-board intelligence that understands the scientific significance of the acquired data. EOA consists of a combination of vision-based perception and collaborative path planning with on-board and ground computation to significantly increase the driving distance of energy-limited rovers. These capabilities are built upon the latest technologies in deep learning, optimal planning, and terramechanics. The algorithms will be tested on the Athena test rover in JPL’s Mars Yard and benchmarked on the HPSC emulator and evaluation board.