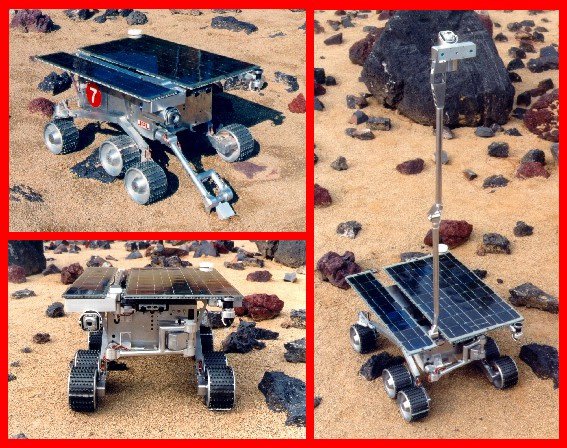
Three views of the Rocky 7 rover, the platform created to prototype and demonstrate all technoologies for long range science roving.
Beyond the 1997 Microrover Flight Experiment on the Pathfinder Mission to Mars , NASA/JPL intend to continue to use small robotic rovers for planetary surface exploration. This task is designed to expand the current science enabling capabilities of these microrovers, while increasing their range of operation. This work includes exploration of new or improved methods of mobility, manipulation, sensing, computation, and control. The research is divided into three categories:
- Rover Technology: new Rocky 7 rover design, construction and testing; sensing, perception, and control for navigation and manipulation.
- Science Data Acquisition: integration and operation of real science instruments; autonomous sequencing for nominal and contingency operations; data reduction.
- Operator Interfacing: graphical programming of rover operations; fused display of collected science data; WWW access.
For experimentation, we have created the Mars Yard outdoor test area for this task and several components of the Pathfinder mission. In addition, we will be conducting field trials in the Mojave desert at Lavic Lake, in collaboration with scientists from Washington University and elsewhere. For details of these field tests, visit the
Mojave Field Experiments website at Wash U.