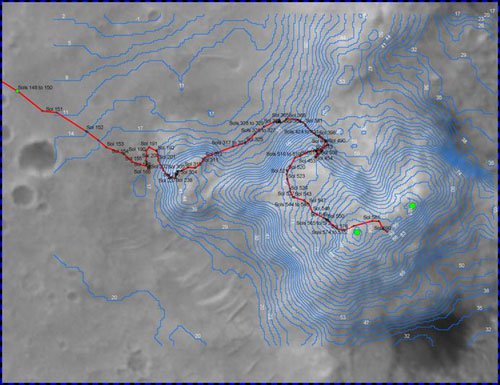
Localization results for the Spirit MER rover traverse up Columbia Hills.
The effort will develop an image network based system to support long range (>5km) autonomous rover navigation at an accuracy of up to 10m (0.2%) in a rough terrain environment. An image network will link the overhead orbital images (including orbital images, and descent images, if available) and the ground images (including rover panoramic images and traversing images) through ground land features and remote landmarks (Figure 1). The integrated overhead and ground image network presents a much stronger geometry than any individual type of images or stereo pairs. Particularly, the remote landmark information from the overhead images can be used to strengthen the geometry of the area farther away from the landing center and to ensure a high accuracy all over the landing site.
JPL has a co-investigation role for this work, which is led by Ron Li of Ohio State University,
Mapping and GIS Laboratory.

