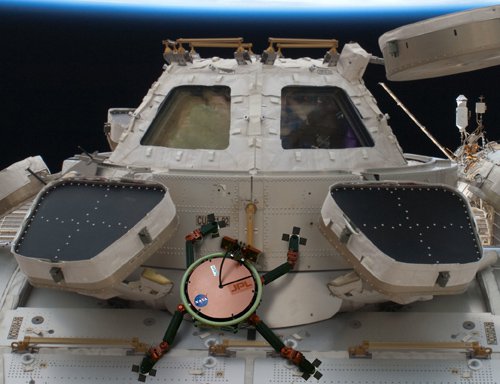
Artists depiction of IRIS inspecting ISS.
Currently, no robotic system exists that can provide mobility and sustained operations on the surfaces of microgravity objects. This situation persists despite the applicability of these operational modes to both manmade structures, such as the International Space Station (ISS), and primitive bodies like comets and asteroids. The IRIS initiative will resolve the gap with the development of a robotic vehicle characterized by a body with four limbs equipped with adhesively anchoring grippers for surface mobility and thrusters for free-flight. Overall, the IRIS initiative will prove the viability of a small (~20kg) robot that would revolutionize microgravity mobility by providing precise movement, sustained surface interactions, fail-safe recovery behaviors, and large area coverage.
The IRIS effort will specifically focus on laying the technological groundwork for inspecting the ISS for micrometeorite damage. Using an airbearing table to simulate microgravity in two dimensions, the IRIS robot will demonstrate adhesively anchored walking, free-flying using micro-thrusters, and the transitional operations of take-off, and landing. In addition, it will carry a relevant contact inspection instrument and demonstrate the use of that instrument, including the generation of the adhesive reaction forces necessary for the use of the instrument.
People on this Task
Neil Abcouwer

