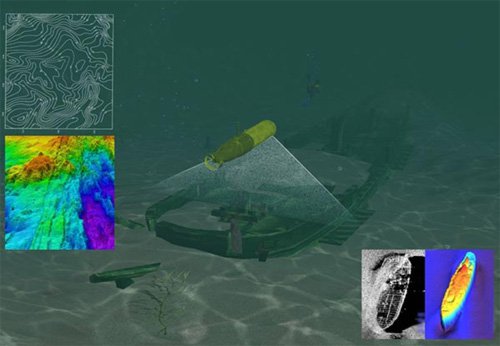
Operational scenario for the iPuma system.
The primary goal of this project is to integrate and demonstrate multiple levels of autonomous decision making capabilities on iPUMA autonomous underwater vehicle. These capabilities are (1) in-situ mission modification and planning; (2) vehicle control to optimize maneuvering, manage the power consumption, and to maintain vehicle safety; (3) autonomous obstacle and terrain recognition; and (4) autonomous adjustments in the sonar line-ups and vehicle operating modes to optimize the sensing performance. Such autonomous behavior will be enabled by JPL-developed Control Architecture for Robotic Agent Command and Sensing (CARACaS) intelligent autonomous control architecture that will maintain a higher level of situation awareness and mission performance assessment. After development, simulation, and integration of the autonomous components, this project will demonstrate a set of intelligent behaviors including obstacle and terrain avoidance, terrain following within constricted environments (such as a harbor), real time ahead-looking sonar (ALS) optimization via sensor mode selection and vehicle operation, and on-the-fly mission modification based on in-situ sensor performance assessments.
This work is funded by the Office of Naval Research.

