Approach and instrument placement validation.
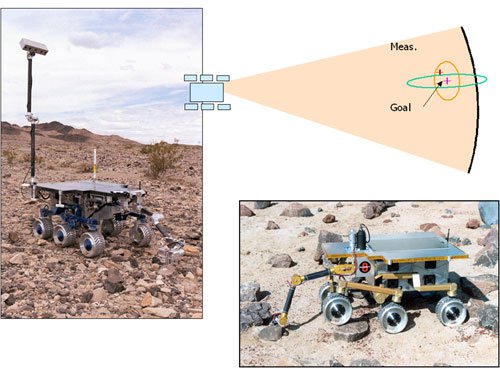
We are developing fail-safe, reliable models for MSL rover software components, to enable one-sol (one Martian day) autonomous target approach and instrument placement.
We are conducting experiments to determine safe, reliable operational and environmental constraints for each component, to develop guidelines on what components and operating models can be used under what conditions and with what parameter settings.
The task primarily involves evaluation of two main components: visual tracking for target approach (both 2D and 3D), and manipulation for instrument placement, which includes workspace kinematic analysis, degrees of freedom, collision detection, contact sensing and verification, and path planning with collision avoidance.