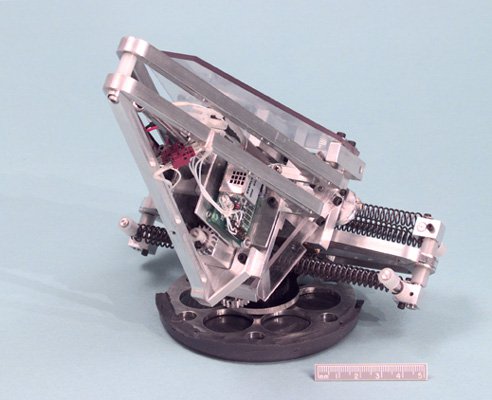
The Frogbot hopping robot prototype.
First Generation: the Hopbot
The goal of this phase is to explore a different mobility paradigm which may present advantages over conventional wheel and leg locomotion. The approach is to achieve mobility by hopping and perform science and imaging via rolling. The device is currently equipped with a single video camera representing the science sensor suite. The hopper is equipped with a simple microprocessor to autonomously execute a set of fixed tasks. This rover uses a single motor for hopping in a specified direction as well as pointing the camera via rolling. The action of pointing the camera determines the hopping direction since the body is statically balanced. Current tests have achieved about 80 cm of hopping height. However, the control of the hopping direction is not satisfactory due to friction in the pointing mechanism and too much dependence on the surface type. Current and future work in this task will focus on improving the efficiency of the spring mechanism, on achieving a better hopping control on soft terrain, and on integrating miniaturized sensors in the rover body.
Second Generation: the Frogbot
This phase has developed a minimalist hopping robot that can perform basic exploration tasks on Mars or other moderate gravity bodies. A single actuator can control the vehicle's jumping and steering operations, as well as the panning of an on-board camera. Our novel thrusting linkage also leads to good system efficiency. The inherent minimalism of our hopping paradigm offers interesting advantages over wheeled and legged mobility concepts for some types of planetary exploration. The task addressed the evolutionary development of the system, issues relevant to the design of such jumping systems, and experiment results.
Third Generation: Hopper on Wheels
This phase has evolved our concept of hopping robot for planetary exploration, by combining coarse long range mobility achieved by hopping, with short range wheeled mobility for precision target acquisition. We show that a small number of actuators can control the vehicle's mobility, which now includes hopping distance and angle control, and independent wheel control. The electronic control of this prototype consists of a simple multiprocessor architecture, which is coupled to a mechanical timing logic for additional reliability and reduction in actuator number. This vehicle carries a color camera, a pair of dual-axis accelerometers, and an RF modem for remote communication. The task has addressed issues relevant to the design of jumping-wheeled systems, and performed field experiments in different conditions.


