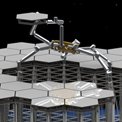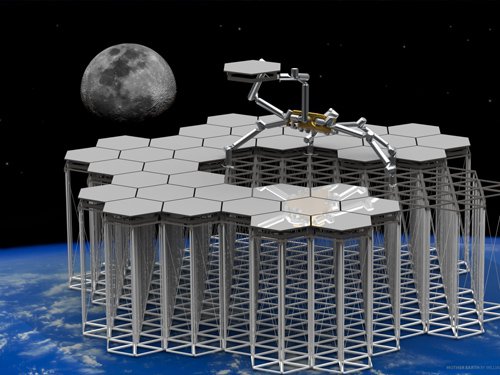
Artists conceptual drawing of telescope mirror segment assembly by a limbed robot.
In-space robotics technology and a telescope design concept are being developed to enable future 10m-100m (aperture diameter) space telescope missions. Such large telescopes cannot be folded into a conventional rocket payload and, therefore, must be assembled from smaller components in space. A limbed robot concept capable of assembling telescope modules is being developed. Leveraging on-going telerobotics technology activities, we can effectively demonstrate in the lab the capability for in-space assembly of large structures. The product of this task will be an integrated robotics system concept and matching telescope design concept for a large space telescope mission, and lab demonstrations of telerobotics assembly technology needed to construct it on orbit.