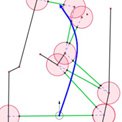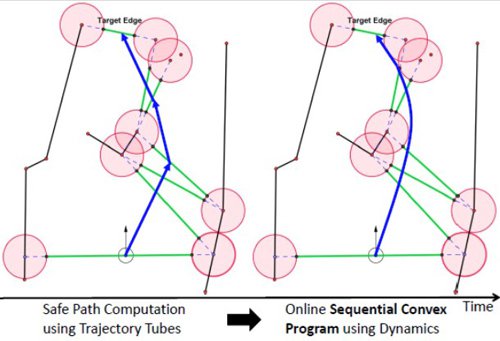
A graphical representation of path creation.
Current planning algorithms are not capable of planning an optimal path in a highly dynamic and cluttered environment in real-time. This capability is essential to highly dynamic missions with low computational power. Objective of this effort is to create a cooperative real-time, computationally efficient, yet optimal motion planning tool tightly integrated with high performance control that could be easily tailored to a variety of future JPL missions.
The two main foci of this research are fast-computation motion planning (planning and dynamically adapting desired trajectories to allow for fuel-optimal/safe/agile maneuvers) and robust algorithmic scalability to multi-spacecraft and swarm systems validated by testbed demonstrations.