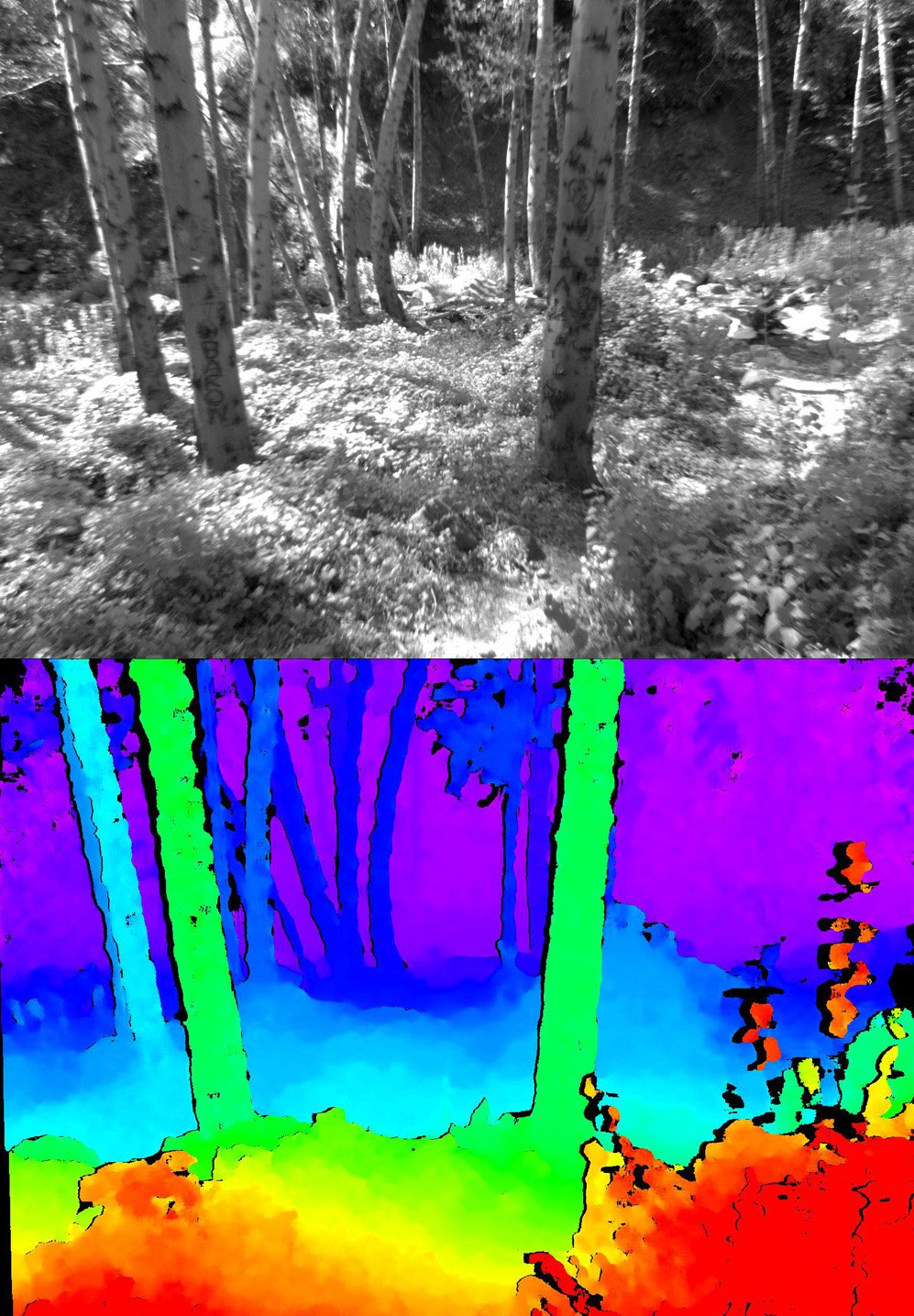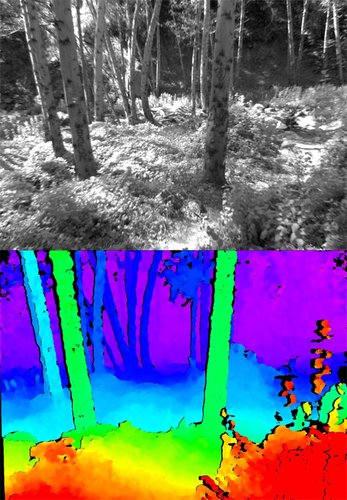
Stereo vision-based obstacle detection in complex environments. Shown are the left monocular image and the computed, color-coded, depth map.
The goal of this task is to develop and demonstrate fast, accurate, reliable, stereo vision-based obstacle detection in complex environments for day, night, and atmospheric obscurants.
People on this Task
Larry Matthies