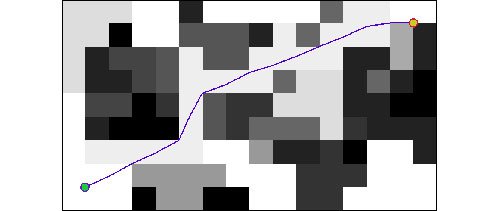
A Field D* path through a D* cost map.
This task will integrate the Carnigie Mellon University (CMU) Field D* real-time global path planner into MER for a technology demonstration on Mars. Currently, path planning is performed locally by a hazard avoidance algorithm that evaluates several potential arcs of travel. A rover can move up to 3-4 meters between replans. The D* algorithm will estimate the cost of travel between the end of each local arc and the current selected long range goal position, thus coupling local and global path planning. The D* software has been successfully used for several years on unmanned ground vehicles funded by the Army. Here, new development will be restricted to interfaces between the D* software and MER.
People on this Task
Arturo Rankin